Our new video provides a simple overview of real-time kinematic (RTK), post-processed kinematic (PPK) and NTRIP. It also demonstrates how Reach RS+ can be used in the field for various applications.
Resources
Check Emlid docs to learn more about real-time kinematic and Reach:
Post-Processed Kinematic (PPK) technique is widely used for mapping with drones. In this scenario Reach RS/RS+ base on the ground and Reach M+ rover on a drone independently log raw data which is post-processed after the flight.
For mapping, it’s crucial to sync an onboard camera and Reach M+ rover. To ensure smooth and reliable synchronization of Reach and a camera, we’ve recently added a hot shoe adapter to Reach UAV mapping kit. Also available from our distributors
Learn more about our new product and read why synchronization of a camera and Reach M+ is important on our blog! We have also posted an introductory article about PPK, the guide will be useful to everyone getting started with PPK and UAV mapping.
Summer is in full swing and it’s the best time to get into drone hobby! We’ve prepared a great offer for all drone enthusiasts — from today and until the end of the week get advanced drone controller Edge and Raspberry Pi Autopilot board Navio2 with 20% discount!
To get the discount go to ouronline storeand use coupon code “edge4th” during checkout to save$140onEdge Kit or “navio4th” to save$34 on Navio2 autopilot. Edge and Navio2 are in stock and ready for worldwide shipping!
We’ve released the new v1.4 image for Edge and QGroundControl with v3.2.4-edge-2.3 tag!
The new v1.4 image includes a couple of new features that ease your day-to-day work with Edge. The most prominent of those changes are:
Camera hotplug support
Wi-Fi connection to your own networks rather than being stuck at AP network created on Edge
LED statuses are more user-friendly now
QGC v3.2.4-edge-2.3 has got a lot of new features too:
New firmware upgrade tab
MacOS support is now official
New Wi-Fi setup tab
See the full release message, features description, and changelogs on Emlid community forum!
Get started with Edge
With theEdge drone controllerlaunch, we’ve also rolled out extensive documentation for our new autopilot. CheckEdge docsfor more information.
Besides the docs, we’ve been also working on the tutorial for Edge. It walks you through 5 simple steps of getting started and setting up video streaming. The video covers unpacking, firmware update, basic components set up and ground control station configuration.
Edge Quickstart video will be helpful to everyone who’s just starting with Edge or is considering it for the next project! Setting up video streaming with Edge is easy as ABC, check it yourself!
We are pleased to announce Emlid Edge drone controllers are in stock! The time has come to get your drone and your action camera prepared for flight!
Emlid Edge is the first autopilot platform to feature an integrated HDMI input and video compression engine allowing it to capture Full HD video from an onboard camera such as GoPro or any other HDMI-capable camera. Video is streamed directly to the Ground Control Station over a long-range 5.8 GHz Wi-Fi link.
Also, check out our Youtube channel where we continue sharing Edge demo flights!
The video covers the process of first-time updating: powering Reach RS on, connecting to a Wi-Fi and installing the latest version of ReachView.
It will be especially helpful for beginners starting using RTK GNSS receivers by Emlid for land surveying, mapping, precision agriculture and other applications requiring centimeter accuracy!
Emlidtool has tab completion from now on! So just type emlidtool and then press tab to see all options
New RCIO features: There was a major rework on both MCU and Linux part (rcio-dkms v0.8.2) . Here’s the overview:
There’s now barely any limitations on using channels 4-8. You can hook up a servo on 5th servo to your copter and everything’s going to be working as expected
All drivers consolidated into two (rcio_spi and rcio_core)
Fixed a very rare bug which could start motors unexpectedly in case of a very frequent ArduPilot restart
Maximum PWM frequency is now 1000Hz!
A lot of debug info will be printed out to dmesg in case something goes awry
Run sudo emlidtool rcio check to check if you need to install new firmware which has all the support needed
New ArduPilot features
Multicopter firmware consolidated into single binary, users must set FRAME_CLASS parameter (1:Quad, 2:Hexa, 3:Octa, 4:OctaQuad, 5:Y6, 7:Tri)
Sensor and Optional Hardware Improvements:
IRLock can be connected to any I2C bus
Here+ RTK GPS (UBlox M8P RTK) support
Garmin LidarLiteV3 support
TeraRanger Tower sensor
IMU sampling rate for MPU9250, ICM20608 IMUs to 8kHz for improved vibration resistance
LightWare I2C drivers usable on Copter
MaxBotix sonar with serial interface now supported
Pozyx support for Non-GPS flight
Maxell Smart Battery support
Invensense ICM-20602 IMU and ST L3GD20H gyro drivers added
More than three years ago Emlid was born with the idea of building a versatile and powerful drone controller. We've pursued the concept of a controller that will become a primary platform for customizable drone projects when your goals go beyond the limits of traditional autopilot boards. Today we are thrilled to announce advanced drone controller Edge.
Emlid Edge is the first autopilot platform to feature an integrated HDMI input and video compression engine allowing it to capture Full HD video from an onboard camera such as GoPro or any other HDMI-capable camera. Video is streamed directly to the Ground Control Station over a long-range 5.8 GHz Wi-Fi link.
The kit consists of the Edge drone controller, external UAVCAN GNSS module, wide range power module based on Hall sensor and a long range 5.8 GHz Wi-Fi link. Edge features dual-processor architecture, temperature-stabilized dual IMU and plenty of ports for extensions all packed in thin and sleek aluminum case.
At its core Edge runs ArduPilot - the most fully-featured and robust open source autopilot software. Support for Edge is added in a user-friendly and cross-platform QGroundControl GCS. Mission planning, firmware updates, vehicle configuration and video stream viewing – everything is handled through a single application.
The kits are available for $699 and will be shipped in early November 2017. The limited quantity of kits is available in the first batch.
We’ve recently released a new version of Emlid Raspbian for Raspberry Pi and Navio. It got a modernized interface making the way you interact with Navio even easier.
This update also adds notable features simplifying software development and hardware integration. All this expands the scope of applications within all the same and only RasPi and Navio on board of your drone!
Updates:
ArduPilot:
ArduCopter 3.4.6, ArduPlane 3.7.1, ArduRover 3.1.2 are preinstalled by default
a bunch of systemd scripts to get you in the air as easy as it can be and also minimizing risks of misconfiguration
easy frame selection
ROS (Indigo):
For those looking to expand Navio capabilities beyond what ArduPilot offers, Robotics Operating System now comes preinstalled. It is a robust and accessible framework to build complicated robots.
Do you remember Robotic Mower with the Navio2, it’s running ROS:
emlidtool:
This is a new tool to make it easier for you to get information about your board, OS, kernel and etc. It will be used for other awesome features in the future. Just typeemlidtoolto get a hang of it!
Experimental Wi-Fi broadcast:
Lets you broadcast video stream over Wi-Fi without introducing handshake delays giving you a feel of analogous video stream. It supports two chipsets at the moment (Ralink RT5572 and Atheros AR9172).
Check out Wi-fi broadcast projects by our community member Yannis inhis blog.
With the latest firmware update we've updated the developer section in our docs. It's easy to start programming RasPi+Navio with many examples available in Python and C++:
Barometer
ADC
PWM output
RC input
RCIO
9DOF IMU
AHRS
GPS
RGB LED
In the end, here is a cool autonomous RC car with Navio2 running modified Donkey (the tutorial):
In our latest blog post we’ve introduced the new version of ReachView app for both - tiny Reach RTK and freshly launched Reach RS field-ready receiver.
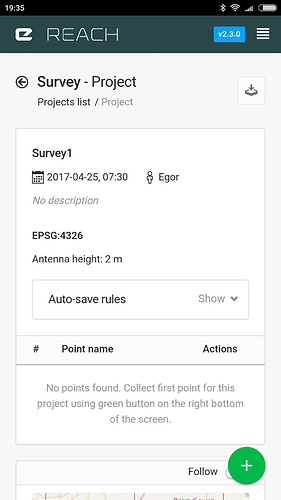
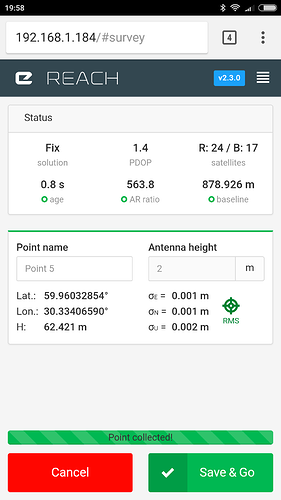
What makes this release so special is a handy point collection feature. Besides providing the main configuration funtion, ReachView v2.3 appears as a self-sufficient survey tool running on your RTK unit!
Screenshots of Survey Tool
Reach and Reach RS have been waiting for this feature. After few hours from the official announcement:
New Survey feature in ReachView provides:
Project-based point collection
Collection screen with a real-time progress indicator, RTK and averaging statuses
Collect the points either manually or with project-wide autosave rules
Project view with a map and summary point list
Export your data to DXF, GeoJSON, Esri shapefiles
All this is making ReachView a great assistant in the field. A set of Reach RS and a smartphone or tablet is all you need to conduct survey or collect Ground Control Points (i.e. before mapping with Drone Deploy)!
As you see it is a big release for us and we will push the functionality even further.
Emlid Community is actively sharing feedback about the first tests with Survey Tool and here is the demo of workflow prepared by Emlid pro-user @TB_RTK.
We’re also getting great reports about how Reach RS is doing from all over the world. We’ve picked some of them and want to share first @Luke_Wijnberg extensive field-tests in South Africa - find it in our blog.
Reach RS in South Africa
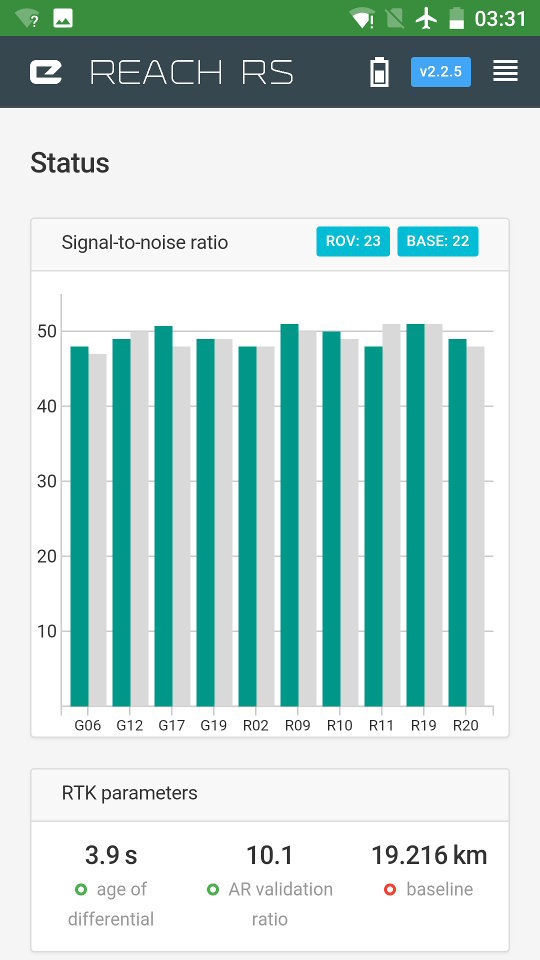
Reach RS has built-in LoRa radio as one of many connectivity options providing a reliable correction link up to 8 km. We thought so. Actually with the LoRa modulation it is possible to hit up to 19km in line of sight and the story cutting all doubts of it came from Canada. You’ll find detailed tests of Reach RS built-in radio in this article.
Reach RS in Canada
Reach RS is rugged and durable, we told this on the product page and in press release, but to make sure:
RC buggy crash test
The unit photo after 24 hours in -26C
The full compilation of different cool things (including AutoCad360 + Reach demo) is available here.
New Reach RS docs (btw we've got new docs!) featuring some tutorials you might be interested:
Event38 now offers Emlid Reach upgrade to its vast fleet of UAVs aimed on providing ready-to-go PPK mapping solution. Reach PPK enabled system is able to deliver centimeter-level accurate 3D models without use of ground control points.
Emlid and Event38 products are a natural fit as both offer professional performance at an affordable price. Emlid will provide Reach and Reach RS receivers, while Event38 will bring its leading expertise into upgrading the E384/6 aircrafts with PPK mapping bundles. Integration of the Reach system enables map collection at centimeter level precision. Check out thecase studyconducted by Event38 to learn more about the system’s real world accuracy tests.
Both E384 and E386 may be now upgraded with a mapping kit which includes Reach installation, precise timing integration and utility for post-processing and image tagging. Recently releasedReach RSreceiver is used as the PPK base station. Existing Event38 users can send their aircraft and camera for an upgrade, recalibration and test flight.
Emlid team is proud to present Reach RS - ruggedized, battery-powered RTK GNSS receiver. It enables centimeter accurate positioning for survey, mapping, agriculture and drones once again changing our perception of the equipment cost. For laying out GCPs, or other types of survey work two Reach RS units operate together, one in base and another in rover mode. Reach RS is also seamlessly compatible with already available Reach module - compact and lightweight solution for drones with ability to integrate with autopilots for navigation and cameras for photo geotagging.
With an integrated high performance dual-feed antenna mounted on a large ground plane Reach RS is able to reliably track GPS, Glonass, Beidou, Galileo, QZSS and SBAS satellites.
The receiver is packed with Wi-Fi, Bluetooth, RS232. It is able to access NTRIP corrections, stream data to the cloud and fetch software updates. In remote areas Reach RS units can communicate via integrated LoRa radios giving you a reliable correction link on distances up to 8 kilometers. Reach RS is a seamless addition to your existing equipment thanks RTCM and RINEX support.
Reach RS comes with a ReachView web app that works on any device with a browser and does not require an internet connection. Easily configure settings, record and download RINEX logs, view status, satellite signal strength, captured events and your location on a map. 2 gigabytes of internal storage are available for raw data RINEX logs and solution tracks which can be easily accessed from the ReachView app.
With IP67 rating and rugged polycarbonate enclosure Reach RS is ready for outdoor work. The receiver weighs only 700 grams and is just 145 millimeters wide making it one of the smallest and lightest RTK units available.
Special offer: pre-order Reach RS now and you will not only be among the first to receive it, but also get a $100 discount off each unit making it only $699!
Make sure to secure your units – offer is valid only for the first batch that will be shipped in mid-March 2017.
It's always such a pleasure to find new projects with Navio2 and Reach RTK GNSS in project category on our community forum. This time we've decided to share the details and cool demonstration of one of them.
Recently @Mr337 shared his terrific MowPilot - autonomous lawn mower with Navio2 on board running ROS.
Navio2 is responsible for interface with GPS, RC In/Out, I2C, and it will be used for some simple sensor interfacing. All while the Rpi3 is running ROS in making decisions.
The fastest speed for now is 1.5ms/ (3.3 mph) while still keeping cutting accuracy.
The error is normally within 4 inches but can peak to 8 inches with really rough terrain.
Don’t miss out our best deal for Black Friday! Offer is valid all over the weekend and Cyber Monday.
To get the discount go to our shop and use coupon code “black” during checkout to save 85USD on Reach RTK kit or “friday” to save 34USD on Navio2 autopilot.
Please note that coupon codes cannot be combined with other discounts.
Tuffwing, a manufacturer of affordable aerial mapping systems recently performed integration of Reach RTK to enable making precision maps without use of ground control points. The system was benchmarked by comparing direct georeferenced model with a set of GCPs, used solely for error detection purposes. Achieved lateral RMS error is just 4cm according to the Pix4D quality report.
Possible setup for surveying drone with Reach RTK and Tuffwing hot shoe.
The key feature of the setup is use of Reach RTK and Tuffwing/Reach RTK hot shoe cable together connected to the camera's hot shoe. This cable powers Reach rover, triggers camera from Pixhawk and directs flash sync pulses to Reach. Exact moment of each pulse is stored as time mark in the Reach RINEX files. No configuration for the Reach hot shoe cable is required, the camera will automatically trigger the hot shoe and the Reach will automatically record events down to fractions of a millisecond. This process does not require communication between autopilot and RTK receiver.
After the flight the time marks are converted into geotags with a free RTKLIB software provided by Emlid and are used for direct georeferencing of images. Commercial software such as Grafnav will be efficient as well.
To validate performance of the system Tuffwing organized flights using their Tuffwing UAV Mapper drone with Reach RTK GPS onboard. 112 photos were acquired with a Sony Nex 5T with Sony 16mm lens triggered by a Pixhawk.
Information about acquired data:
Altitude: 100m.
Average Ground Sampling Distance (GSD) 2.82 cm / 1.11
Area Covered 0.1139 km2 / 11.3916 ha / 0.044 sq. mi. / 28.1638 acres.
Comparative quality report prepared in Pix4D by Tuffwing was based on geotag file from Reach RTK and GCP-file for validating the accuracy of 3d map. It is showing that the RMS error for Y-direction is about 4 cm while X-direction is less than 3 cm. All the data with detailed manual for processing the report is available.
Tuffwing is now working on documentation to show complete data processing workflow.
The deal lastsonly for 48 hours- do not miss the offer!
If you are upgrading your fleet to Linux-based autopilots or would like to install RTK navigation or do precision mapping - we have deals right for you!
Reach is capable of up to 14Hz centimeter-level accurate navigation, has plenty of of space for logging RINEX and supports NTRIP corrections natively.
With Navio2 you can run ArduPilot and your own applications alongside it directly on Raspberry Pi which makes it a perfect platform for drone hackers and for educational purposes.
Everything is in stock and ready for worldwide shipping by air mail or DHL express.
To get the discount go toour shopand use coupon code “reach4th” during checkout to save71USDonReach RTK kitor “navio4th” to save30USDonNavio2 autopilot.
For the last weeks we’ve been working relentlessly on the new revision of our special Raspbian image for Navio autopilot that supports Raspberry Pi 3. The new image works on the following hardware combinations:
Raspberry Pi 3 with Navio2
Raspberry Pi 3 with Navio+
Raspberry Pi 2 with Navio2
Raspberry Pi 2 with Navio+
Here’s the overview of the features:
Raspberry Pi 3 support
Raspberry Pi 3 is the new version of Raspberry Pi SBC. It is based on the new BCM2837 which has four 64-bit A53 cores with higher clock speed. Upgrade in the clock speed and new architecture results in 50 to 60 percent better performance compared to Raspberry Pi 2. This gives more resources for the APM autopilot, video streaming and other drone software.
New Linux kernel
We decided to use the newer Linux 4.4 kernel that is the LTS release version which means that it will be supported for a longer period of time.
This version also features improved AUX SPI driver for more robust communication with Navio RC IO coprocessor.
Kernel headers are pre-installed in the system allowing users to compile kernels modules with ease.
Easy updates
We’ve set up DKMS subsystem to provide updates in the easiest way possible.
System updates now work by simply running the dist-upgrade. It will roll out all latest features and improvements of the software and firmware.
Simple initial Wi-Fi configuration
We’re aware that there’s a lot of Windows users out there who suffer from the initial setup because configuration files on EXT partition aren’t accessible. We have moved wpa_supplicant.conf to the FAT32 partition.
All that is needed now to setup WiFi is to insert SD card in your computer, open wpa_supplicant.conf and add your network credentials. After that you’re good to try out your Navio!
Pre-installed GStreamer
So many of our users use Navio for low latency video streaming with GStreamer. Now there is no need to download 300MB of gstreamer1.0 packages because they are now also a part of the image.
Where can I get it?
The image is available for download in our docs for Navio2 and Navio+.
We’re eager to hear your feedback on this release. Visit our community forum and tell us how the new image works for you.
This landing looks so good like it is a reversed takeoff video. In reality this is a demonstration of using Reach RTK integrated with Pixhawk. This feature is now available for all ArduPilot based autopilots, including our beloved Navio+ and Navio2.
Only single radio has been used, with RTCM3 corrections tunneled through telemetry and Pixhawk. As Reach is equipped with Wi-Fi it is easy to connect to it and use Mission Planner to inject correction data into the MAVLink stream.
We got several requests from the ArduPilot developers not to use NMEA protocol for this integration as it does not carry all required data. GPS gives autopilot more than just location data. Speed, accuracy estimates, heading and more is required for ArduPilot to take full advantage of an RTK GPS. This is why we have added custom ERB (Emlid Reach Binary) protocol. For other autopilot systems NMEA output is available as well.
In this test flight we used ArduCopter 3.3.3-Reach, it is stable firmware with ERB protocol support added on top. We will provide custom builds for now, but considering that this code is already in master we expect to see full Reach RTK support in ArduCopter 3.4 . If you would like to build your own firmware, here is the related pull-request.
We have put together detailed docs about this integration that cover Pixhawk, Radio and Reach settings as well as Mission Planner GPS inject feature.
Reach users will need to perform an update through ReachView app. ArduPilot integration is available in version 0.3.0 or higher.
All settings, status and logs are accessible through our user-friendly ReachView web app. It works on any device that has a browser. The app is hosted on Reach itself thus does not require internet connection to work. You can connect Reach to the internet for updates and NTRIP corrections.
Only four months since we have shipped first units to our Indiegogo backers and development is moving forward at a great speed! During this time we have been working restlessly adding new features, improving stability and overall user experience with Reach. This release brings an amazing feature - integration with ArduPilot based autopilots. New features also include Bluetooth solution output, which allows to output enhanced coordinates to a number of Android apps, automatic log conversion to RINEX and many more.
New Raspberry Pi 3 is about to be announced, it will bring 64-bit 1.2Ghz cores and Wi-Fi connectivity. It is surely an exciting update for Navio2 and we can’t wait to get it into the air.
It is expected that the new processor will be similar to the previous BCM2835 with upgraded cores (probably Cortex A53), just like it was with the previous upgrade from single-core ARMv6 to quad-core ARMv7. That means that the peripheral blocks should stay the same and will have a high level of compatibility while bringing more performance. Cortex A53 is 30-40% faster than Cortex A7 according to data from ARM.
Build-in WiFi and BLE should simplify the configuration of the board eliminating the need in USB adapters.
As soon as we get our hands on the board we will make sure that it is supported by APM and will work with Navio2 autopilot HATs. As Raspberry Pi foundation maintains 40-pin connector compatibility it should be a seamless upgrade. We are yet to see how different the software will be for the new processor.
Thanks toCNX-Softwarefor bringing the news. You can read more about Navio2 autopilot at emlid.com .
Emlid is proud to announce Navio2 - the new version of Navio autopilot.
Navio was the first Raspberry Pi based autopilot and grew up to become the main Linux APM platform. With Navio APM flight stack runs directly on Raspberry Pi under real-time Linux kernel. Compared to classic microcontroller-based autopilots this gives more CPU and memory resources as well as incredible Linux networking capabilities.
With Navio you can connect an LTE modem or high-power WiFi to obtain full network access to the autopilot. Stream video from Raspberry Pi camera, download photos or run your software alongside the APM.
We have listened closely to our community and included numerous improvements in Navio2.
New features in Navio2:
Dual IMU.We’ve added second IMU chip to improve flight experience and for redundancy.
Advanced power circuitry. Triple ideal diode or-ing scheme was already present on Navio+, but Navio2 also features overvoltage and overcurrent protection circuitry on the power module port to protect both the board and your Raspberry Pi.
Improved MS5611 performance.Transactions from other chips on the bus, which MS5611 is connected to, can produce noise during the conversion. We left MS5611 the only sensor on the I2C bus to overcome this.
PCA9685 PWM generator replaced with a microcontroller.On previous Navio version PWM generation was handled by PCA9685 chip. Main limitation of this chip is the inability to control frequencies for separate channels. This lead to problems with motors and servos that work on different frequencies. To eliminate that problem we used a microcontroller that allows to set frequencies for output channels by groups.
PPM\SBUS decoding done by microcontroller instead of DMA.On Navio+ we used DMA to sample PPM signal which was quite heavy on system resources. On Navio2 a microcontroller handles PPM\SBUS sampling leaving processor cores of Raspberry Pi 2 for your tasks.
AUX SPI.Navio2 is the first HAT to utilize AUX SPI controller on Raspberry Pi. Using two SPI controllers allows us to distribute sensors more efficiently. Having twice the bandwidth of other Raspberry Pi based solutions, we are managing to move more data at a greater speed.
ADC port.Using additional ADC channels on Navio+ was not user friendly due to ADC channels being only available on pads at the bottom of the board. On Navio2 these channels are easily accessible on a DF13 port.
Better Linux integration.PWM, ADC, SBUS and PPM are integrated in Linux sysfs allowing for easy access from any programming language. Even deeper integration is coming in the future.
Other small changes:
Right angle servo header
RGB LED position in the board center for better LED visibility
Pulled up pins in UART port to allow easy 3DR Radio connection
Nylon screws in the package to avoid magnetic interference
Camera cable cutout
PWM channels are protected by ESD clamps
All these new features come at the same price and Navio2 is also available with 30% edu discount.
You can find more information and order Navio2 atemlid.com.