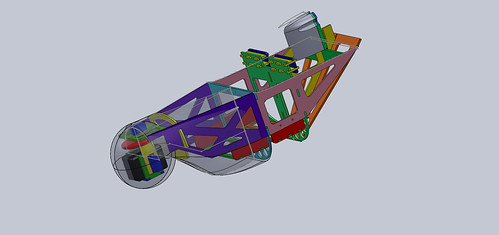
Ok , this is what i've been up to for the past 6 months besides ignoring my family working and getting little sleep . took me about 300 hrs of CFD time on my cluster alone plus a whole lot of cad work .the flight surfaces are well trimmed through the earlier iterations of the early techpod .I found the airflow around the bottom side of the wing root towards the tailing edge very turbulent forming a large "bubble' illustrated here
this would seem endemic to this aircraft configuration . I was able to eliminate it by reiterating the fillet and wing root area and slightly increasing the incidence . I was able to get the drag down to about .8 lbs @ 60 mph
I have a prototype on order and should be receiving it in about a month . and here is the part where you come in . if all goes well with the prototype i can order a large batch . Only thing is the minimum order comes to $40,000 . I work for a living so i don't have that kinda scratch . I do have about $15000 saved up however . anyway , I;m thinking about using kickstater.com . I would like to get a feel for how many people may be interested in pledging . the kits will go for about $250 retail and i will have ready to flys as well pledgers will get a deep discount.throw me a pm or give me a shout here if your interested . I will post pics of it as soon as it comes in .here are the specs
- Cruise Speed: 32knots
- Max speed – 55knots
- Climb Rate – 2000 ft/min
- Wingspan = 105 in
- Fuselage Length = 45 in
- Dry weight = 2.75 lbs*
- Max loaded weight = 4.4lbs (1.65 lbs of battery/payload)
- EPP Wings and Tail Contruction
- Carbon Fiber Tail Boom and wing spars
- Motor : E-flight Power 10 brushless in runner
- ESC : Castle creation Thunderbird-54
- Batteries: Thunderpower Pro Light v2 3S 2600 mah x2 wired parallel
- Servos:
- 2x hitec HS-81 (elevator,rudder)
- 2x hitec HS-55 (2x ailerons)
- 2x HS-5055mg (pan,tilt)
- TX & RX Spectrum DX-7
- Prop: APC E11x7
- Camera: CCD Killer Camera Micro NTSC Camera