I know a windy day is bad day for drone tuning. But I am testing the autotrim function of Mission Planner today.
All Posts (14049)
Sort by
I think agricultural uses are going to be one of the main drivers of commercial drones and other robotic technologies, so I love stories like this. From The Economist:
[Lettuce] is a fiddly business. Not only does lettuce need to be fertilised and weeded, but also "thinned" so that good plants do not grow too close to each other, inhibiting growth. Much of this is still done by hand. Labourers, who tend to be paid per acre, not per hour, have little incentive to pay close attention to what they pull from the ground, often leading to unnecessary waste.
Enter Lettuce Bot, the brainchild of Stanford-trained engineers, Jorge Heraud and Lee Redden. Their diligent robotic labourer, pulled behind a tractor, takes pictures of passing plants. Computer-vision algorithms devised by Mr Redden compare these to a database of more than a million images, taken from different angles against different backdrops of soil and other plants, that he and Mr Heraud have amassed from their visits to lettuce farms. A simple shield blocks out the Californian sun to prevent odd shading from confounding the software.
When a plant is identified as a weed—or as a lettuce head that is growing too close to another one—a nozzle at the back of the unit squirts out a concentrated dose of fertiliser. If this sounds bonkers, it turns out that fertiliser can be as deadly as a pesticide, which is why farmers usually sprinkle it at a safe distance of 10-15cm from the plants to be nourished, so as to dilute its effect. So the robot not only kills weeds and excess heads, but feeds the remaining crops at the same time.
The battery-powered system crunches the image data fast enough to work with 98% accuracy while chugging along at a bit less than 2kph. In September Blue River Technology, a start-up founded by Mr Heraud and Mr Redden, raised $3m from Khosla Ventures, a venture-capital firm active in agribusiness. The launch of a fully operational, ruggedised version of the robot is planned for next year. Mr Heraud is coy about Lettuce Bot's cost, but says it will be competitive with manual labour.
Its creators are also working on a machine capable of excising weeds mechanically using a rotating blade. (Indeed, the robot was originally conceived as an automated lawnmower for parks and other public places but legal issues—think spinning metal blades in areas frequented by children—prompted Mr Heraud and Mr Redden to turn to agricultural users instead.) That would make it a boon to California's "organic" farmers who eschew the potent, weed-killing fertiliser.
Next in Mr Heraud's and Mr Redden's sights is corn (maize), America's biggest crop. Teaching the robot to deal with plants like tomatoes, where distinguishing weeds from the crop can be hard even to a trained human eye, will take longer. But where Lettuce Bot treads, other salad bots are sure to follow.
Looks like fun, and $85 isn't bad for the early backers (I'm among them). Details here.
The iStrike Shuttle was designed with the iOS in mind. We wanted to create something that was unique and unlike anything else out there. The iStrike Shuttle’s sleek vertical body gives it an almost human-like characteristic in its flight pattern and makes use of built-in balancing gyro technology which results in a more steady flight.
For greater ease of use, we have developed an app with multiple operation modes that will suite right and left handed people. In each mode, different operations are done by sliding your fingers over the controls on the screen of your iOS device. You can also use the G-Sensor swivel motions to make the iStrike Shuttle move. After a bit of practice you will be able to hover over your targets with a simple touch of a button you can drop the ball wherever you want.

Raztech Hall Effect Current Sensors
These guys gave me some samples a few years ago when I was working on a commercial project as a consultant Hall Effect Sensors
Its a nice way to measure current as there is no shunt to reduce the voltage which is in short supply on RC models.

This example is like the one I have for high range current like in yellow boat. You 20 mV change in the output signal for each amp.
Therefore the range should be a 2 Volts delta for 100 amps going through the wire.
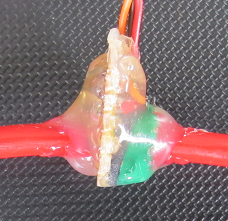
The resolution on a Arduino 10 bit converter give a current resolution of 4.8828125 mV per bits so 409 values representing the 2 volt output change for 100 amps, so approximately 250mA per bit which should be fine when measuring such a chunky supply current.
Notice the chunky wire I fitted there is no other filtering so it will be interesting to see if we need to do some work in the software to filter out any noise.
The whole thing is then potted with hot glue to protect it and a gold connector soldered to the end of the thick cable.
Next I have a lower range version which should be good for my FPV plane.

This device is intended to allow the user to add as many turns as needed to get the range they want, each turn doubling the gain
The one I have has 5 turns of fairly chunky 4 mm² solid copper should be good for the job.
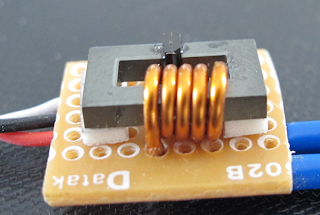 This device has a gain of 55mV per amp giving a 36 Amp working range, and a resolution of 88 mA per bit with the maximum output at 5 volts which is 1024 bits in the Arduino. By the way I should point out that these devices on a 5 volt rail will sit around 2.5 volts with no current flowing, so at a 2 Volt delta the out put should be around 4.5 V. I will test this and see how good it is however I don't think it matters if the top end is clipped of as you seldom operate at maximum current for very long in practice.
This device has a gain of 55mV per amp giving a 36 Amp working range, and a resolution of 88 mA per bit with the maximum output at 5 volts which is 1024 bits in the Arduino. By the way I should point out that these devices on a 5 volt rail will sit around 2.5 volts with no current flowing, so at a 2 Volt delta the out put should be around 4.5 V. I will test this and see how good it is however I don't think it matters if the top end is clipped of as you seldom operate at maximum current for very long in practice.
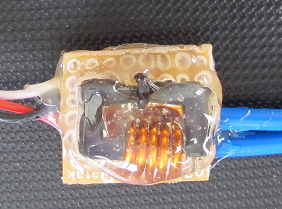
Here it is all potted up with decent sized cables soldered to the ends of the solid copper turns.
I have tested both of these and they work as described measured against my HobbyKing HK-010 Wattmeter & Voltage Analyzer which is turning out to be a handy tool. Going to need a scope next maybe next year.


Notice the chunky wire I fitted there is no other filtering so it will be interesting to see if we need to do some work in the software to filter out any noise.
The whole thing is then potted with hot glue to protect it and a gold connector soldered to the end of the thick cable.
Next I have a lower range version which should be good for my FPV plane.
This device is intended to allow the user to add as many turns as needed to get the range they want, each turn doubling the gain
The one I have has 5 turns of fairly chunky 4 mm² solid copper should be good for the job.

Here it is all potted up with decent sized cables soldered to the ends of the solid copper turns.
I have tested both of these and they work as described measured against my HobbyKing HK-010 Wattmeter & Voltage Analyzer which is turning out to be a handy tool. Going to need a scope next maybe next year.
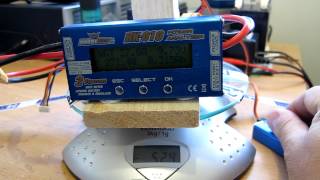
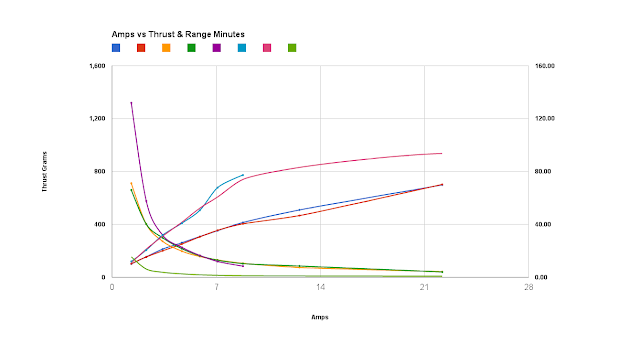
Some test data up to 10 amps calibrated against the HK-010 Wattmeter
Raztec data sheet info

Power Test with DT850 with a 11 X 4.7 and D4023-850 Out Runner Motor


Yellow Plane now has a battery box and nose for the FPV gear, The centre of gravity is on the wing center line with these batteries, the whole pod can be relocated on the keel as required as its only bolted on. I am trying to keep from blocking the flow to the prop with the nose pod as much as I can. It will likely need wheels or skids projecting aft of the battery pod.
Holds 3 Turnigy 2200mAh 3C


Put a tilt mechanism on the camera

The camera OSD, GPS and 5.8Ghz TX all mounted in the same module


There is another 700mAh 3C to be mounted for the electronics supply

Getting some smaller lighter lenses
The Hobby King F1.2 lense is a hulking 70 Grams +

The FPV parts are all mounted on the top cover so an alternate cover can be used if required


Corriboard Yellow Boat at Charteris Bay Banks Peninsula New Zealand
Displacement 1280 g power 350 Watts. With all the FPV gear. Have no way of recording the goggle feed presently, but the GPS read 22Kmh on the OSD not too bad
The FPV key fob camera. This was my first time using goggles an with the boats motion I found it caused a physical reaction in that I was reacting to the boats movement on the water. The scale size of the waves is huge after a minute or so I actually felt a little nauseous. Better to learn about this with a boat than with a plane I think.

FPV Bits
Hobbyking G-OSD II Mini OSD System w/GPS Module
5.8g 200mw FPV Wireless AV Tx & Rx Set
2C Turnigy 5000mAh 20C
2 X NQD 20mm Jet Drives RPM 28,000 @ 90% of 7.4V
2 X Turnigy 2627 4200kv Imax 22A Vmax 11.1
2 X Turnigy AE-30A Brushless ESC
FPV setup weighs 183 grams


FPV setup dds almost 400 grams but she still has a decent pull out on to the plane

Another twin engine jet boat I found

Just as long as I don't look like an idiot :)

The growth on the head is based on these

The OSD image from HobbyKing





Better trust then the 100 Amp ESC withe the Dlux
Test setup 2200mAh 3C 20C Lipoly DT850 motor 11 X 4.7 Pusher Prop

Rpm/V: 850kv
Max Watts: 380W
Max Amps: 35A
Max Volt: 7.4~14.8v (2~4S)
Idle Current: 1.5A
Resistance: 0.039 ohms
Weight: 107.1g
Shaft: 4mm x 39mm threaded
Can Size: 41mm
Mount Diameter: 30mm

Spec.
Max Cont. Current: 30A
Max Burst Current: 40A
Max BEC Current: 2A
BEC Voltage: 5.5v
LiPo: 2~4S
Weight: 23grams
Max RPM (2-pole): 200,000rpm
Size: 51 x 27 x 11mm
Motor Plug: Female 3.5mm bullet Connector

Specification:
Working voltage range: 0-60V
Working current range: 0-100A
Power: 0-6000W
Cell count: 1-6S
Battery type: LiPo/LiFe/LiIon
Weight: 140g
Dimensions: 103x49.5x20mm
Working temperature range: -20~50°C
Fast Company reports:
A USA Today investigation a few years ago found that, of the 250,000 fatal cardiac arrests that occur outside of U.S. hospitals every year, up to 76,000 cases were treatable. That is, the patients would have survived if the ambulance had got there in time. A quick zap with a defibrillator was all that was needed, but many cities could not promise a response within six minutes--the standard survival window.
The normal reaction to this might be: invest in a better ambulance fleet, more call centers, and so on. But Stefen Riegebauer, a graduate student from Austria, has a different, more futuristic, idea: to build a first aid drone network that gets people and equipment to the scene more quickly.
His idea works like this: You create an app that anyone trained in first aid signs up to, creating a mobile community. You then station defibrillator-equipped drones on top of tall buildings across the city, linked by sensors. When someone needs help, they, or someone nearby, sends a request. The nearest first-aider accepts the task, and rushes to the site, and the unmanned vehicle sweeps from the sky, delivering the kit where it’s needed. No more ambulances battling the traffic. No more sirens blaring away waking up the kids. Fewer deaths from tardy responders.
Simple, no? Well, maybe not. But Riegebauer has built a non-working prototype, his visualizations are pretty funky, and he says the drone technology already exists. A team at MIT recently unveiled an autonomous UVV capable of flying at 22 mph in tight spaces; Riegebauer says it would be ideal.

"Autonomous systems are where we are heading," says Riegebauer. 'Why shouldn’t we use them for emergencies, if it can help you?"
His idea has received the backing of the James Dyson Award, reaching the last-15 stage. But Riegebauer stresses that he doesn’t see drones replacing ambulances and staff completely. They would be employed only if they were closer and likely to get to the scene faster.
This is a simple tool to boost development/use on the UDB. It basically loads your Options file and enables editing and compiling (and soon uploading/burning). Here are a few screen shots.
The above is the main screen showing the general settings, including the Vehicle Name, MAVLINK SYSID, among other general Settings.
Above is the screen to change I/O Settings.
And below is the screen for the all useful control gains....
Eventually hope to use the tool to edit waypoints. Working on this currently hoping to have 3D editing interface, using NASA World Wind for Java (WWJ). The waypoints will translate to LOGO instructions for mission planning.
WWJ makes 3D views easy, and specifically figuring out terrain elevation.... Even before fully loading the data, you can discern clearly elevation.....
I'll post the code soon on a repository, and hope if anyone finds it useful they'll check it out, give feedback and possibly help evolve the tool.
As its Java, it should be platform neutral.
Thanks Coby for initial design and idea for interface!
You may or may not agree with my thoughts here
http://www.suasnews.com/2012/10/19348/multirotor-hits-skyscraper-and-burns-downtown-auckland-nz/
pyXY - Synapse SM700 Dev Board May Be better than Xbee and seems cost effective
8 X 12 bit analogue inputs could do a RC controller without Arduino's
This Data Sheet details the SM700PC1 module, which includes:
- Powerful 32-bit TDMI ARM7 microprocessor
- Large on-board memory resources
- 2.4 GHz RF Frequency (2400 - 2483.5 MHz)
- -96 dBm Rx sensitivity
- Up to 100mW output power
- +20dBm Tx output power
- 16 RF Channels
- 2.0 to 3.6 Volts Vcc
- Small footprint: 1” x 1.4” (25.4mm x 36.5mm)
- Low power consumption:
- Operating temperature: -40°C to +85°C
- Transmit mode……193mA
- Over 1.5 miles range
- Receive mode………30mA
- FCC, CE and IC certified
- Integrated F-antenna
- Accurate 12-bit ADC for precision sensors
- Small surface-mount IC footprint
- Freescale MC13224V 32-bit ARM7 Processor
- Integrated 2.4GHz 802.15.4 transciever
- Up to 100mW Output Power
- 96k RAM
- Arduino Shield Compatible
- 12-bit ADC, 2 UARTS, I2C and SPI
- SNAPpy Interpreter (Python-like language)
- Over-the-Air Programmable with Another Synapse Module!
- Can be used as a Synapse shield for Arduino
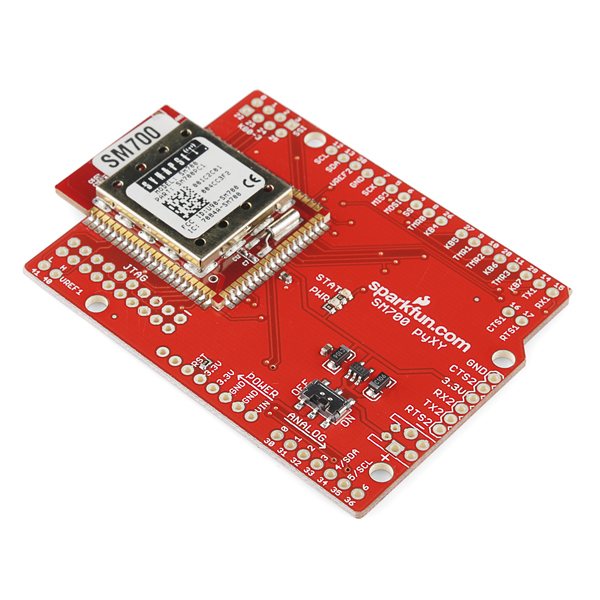
Description: It may look like a regular ol' Arduino shield, but don't be fooled, the pyXY (pronounced 'pixie') is a full blown shield-compatible development board. The heart of the pyXY is the Synapse SM700 wireless network module, a mesh network powerhouse that packs a 32-bit ARM7 processor with plenty of on-board memory. What's more, the SM700 can be programmed in SNAPpy, a Python derivative that makes building interactive networks a snap.
The shield-compatible form factor and pin assignment make this the perfect platform to develop a wireless sensor device, but if you want to add it to your existing Arduino-powered application, no worries. The pyXY has jumpers to swap the TX and RX lines, effectively taking it from development board to Arduino shield.
Don't underestimate the processing power of the SM700, though. With 96k RAM, 46 GPIO pins including 8 12-bit ADCs, and the SNAP OS, the pyXY is a capable board all on it's own. Simply connect the board to your computer using a 3.3V FTDI Basic Breakout and download the Synapse Portal software and you're ready to write and deploy some SNAPpy script. If you have more than one module, you can even program them over-the-air! The Portal software also allows you to tether your Synapse network to full-featured Python scripts on your computer, giving your mesh access to an entire world of libraries and resources.
This was a first test of modeling something in 3D using still images. The subject is a micro quad, 210mm from motor to motor. To make the model, 36 still images were taken from a 10MP DSLR and uploaded to Autodesk's 123D Catch application.
I first attempted to upload this to Hypr3D to do the same kind of modeling, but as you can see here it came up a bit short.
My next goal is to model a much larger object, a building or sculpture perhaps, using a quadrotor drone, and to export that model file to a MakerBot 3D printer at a local community fab lab to produce a miniature version.
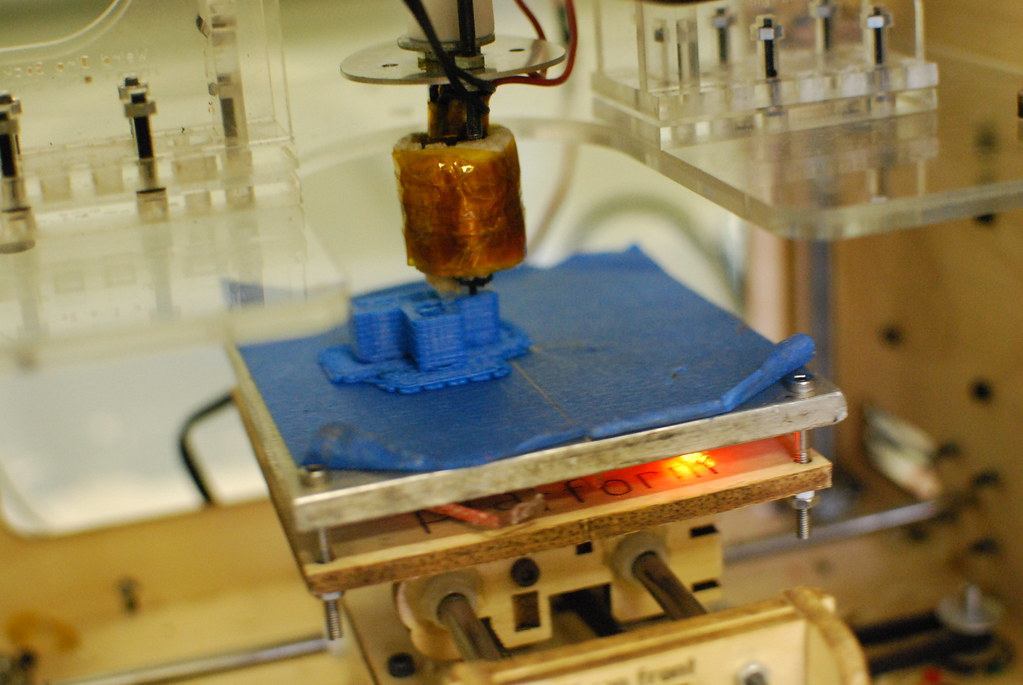
This also has me thinking about imaging, modeling and printing other objects, specifically structural components such as frames and motor mounts. I've seen others make quad frames from 3D printers, I'd like to try my hand at doing that, but do it by imaging the object and creating the model in the same way described above.
I don't know how precise a frame like that would end up being, or how intricate of a support structure one could create with that method. I do, however, imagine there's a practical lower limit where it makes more sense to simply draft it and sent to the lab's laser cutter, where parts could be cut out of acrylic or wood and then assembled. Still, I would like to give it a shot.
Apologies for the incomplete first post here. I had saved the post, closed the browser in a hurry, and expected to come back to it later. For some reason it posted automatically.
This project has been blogged here almost a month ago. Now they are closer to their deadline ($105,345 needed). Recently they've provided many interesting updates on the project (I wish they've done that sooner).
As a backer I'm excited about the potential applications it could support. As John pointed out in his original post, not only this could be used for future autopilots, but also for vision based navigation systems.
more information from their kickstarter page,
http://www.kickstarter.com/projects/adapteva/parallella-a-supercomputer-for-everyone
some excerpts from their page,
The following list shows the major components planned for the Parallella computer:
- Zynq-7010 Dual-core ARM A9 CPU
- Epiphany Multicore Accelerator (16 or 64 cores)
- 1GB RAM
- MicroSD Card
- USB 2.0 (two)
- Two general purpose expansion connectors
- Ethernet 10/100/1000
- HDMI connection
- Ships with Ubuntu OS
- Ships with free open source Epiphany development tools that include C compiler, multicore debugger, Eclipse IDE, OpenCL SDK/compiler, and run time libraries.
- Dimensions are 3.4'' x 2.1''
I've managed to get everything up and running again! This is my newish hexa from uDrones (I've decided to forgo a rant on that subject for now). After working around my PDB issue (still unsolved) and engaging in some close combat, things are looking good.
Recently I have been working on a research project involving autonomously acquiring imagery and data for GIS processing so I've been trying to put in as much time as possible before the snow starts flying. Over the past few weeks I've become significantly more confident in my flying abilities, as the video might infer, and I'm very happy with how the hexa flies with the APM2.5 and AC 2.8 (i've been just lazy enough to avoid upgrading to 2.8.1).
Thanks to everyone who puts so much time into developing all the parts and systems which make these amazing things possible!
Cheers,
Eric
First Conference of the International Society for Atmospheric Research using Remotely-piloted Aircraft. Feb 18-20 2013 in Mallorca, Spain.
More info available here: http://isarra.org
this is my old experiments...
part of the trial was at the night..
sorry guys ... ;-)
Here are a couple of images that show a hacked 2.5mm 4-pole AV plug cut down to its smallest possible form.
I converted this to 3-pole by omitting the tip. For mkII I will keep the tip for mechanical reasons, GoPro puts out only one channel of audio for live view, so we just need the first 3 poles to have conductors attached.
The motive was to be able to have live video out while using the waterproof case, and it works! I bring the wires through the back of the case, where they are sealed and a servo lead terminates on the outside. This position is a neutral point for the tilt and roll arcs, a great place to make a connection!
Carlos Martinez doesn't just have excellent taste in books, but he's also translating the ArduCopter/Plane manuals into Spanish! If you speak Spanish and would like to help, please comment here or PM me and we can give you wiki access.
I have designed my own flying wing and had it cut from flyingfoam. I would love the input of some of the members of DIYDRONES. The span is 60", I chose an MH60 airfoil and added about 2 deg washout. I cutout the motor mount and servo mounts on my CNC router. I'm turning an 850kv motor rated at something like 100w with a 10x4.7. (I'm gonna burn it out at this rate, but oh well, it was cheap.) Flies great on 3 cells. Its a rocket ship on 4S.
I've found the CG to be super finicky, only about a .375" range that it flies acceptable in, at about 15% MAC. Notice in the picture I running a monster 5Ah 3s. This is what I had laying around, I think its a little to big. I think a 2Ah 3S pack would be better weight wise. Because its nose heavy I have huge control throws. If I'm not careful when I get slow and start turning its easy to find myself in a semi-stalled over banking situation. The only way to break that is to let up on the back pressure and apply a lot of opposite aileron. It does have a tendency to spin if I sit on the elevator full aft. I think this is because I have insufficient washout and giant elevons at the tips to compensate for the CG.
Hand launching is a breeze, just give it a little throw while holding onto the battery pack. Landing is an easy affair. It will fly inverted, rolls are not dialed in yet, still messing with differential.
I would love anyones input on the stall characteristics or anything else regarding this bird When I've learned what I can from this I am going to order up a new set of cores with whatever changes I think are necessary, probably more washout, and maybe tips cut with a little toe in.
Eventually I want to put my Ardupilot 2.5 recessed into the foam with an FPV setup. Just ordered my goggles!
Anyone interested in having me cut them anything custom on my CNC router, I've got a 24"x36" CNC router setup. I am tooled mostly for composites like carbon fiber and G10/FR4, but can cut most anything. I'd love to help out the community here with a reasonable CNC service. Send me a PM.
I made my motor mount way to big. I'm going to make a low profile one.
I just glued the servo mount down with thick CA. My z-bend sucks, I know. The control horn goes all the way through the elevon and is glued in with CA.