Take a look at this crasy simulation. This is an openloop designed for mission testing.
Of course I got virtual permission and the whole airspace was NOTAMed to the ground.
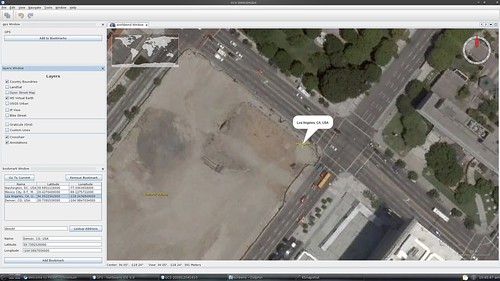
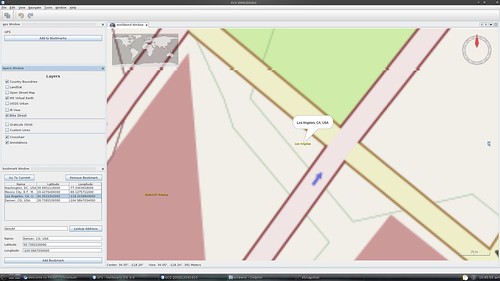
An UAV has 'flown' over Cote d'Azur.
Simulation time around 2h.
In the previous run I saw mission aborts due to exceeded safety distances etc (due to protective config variables from
real-life photomissions).
In short this is a 2h+ mission, over the range of EasyUAV/Easyglider,Cularis but technically barely flyable with Pteryx loaded with a small camera and some 20Ah of lipos.
In practice taking flight permission from there would be impossible (close to one of France's busiest airports).
Log content:
LOG_POINTS=26274
Flight statistics:
Max altitude above takeoff point AGL=206.0[m]
Cumulative climb=205.97[m]
Max distance to takeoff=9.591[km]
Max VLOS distance to takeoff=9.593[km]
Total travel (groundtrip)=67.950[km]
Takeoff: 2010-04-28 16:30:31.799
Last event: 2010-04-28 18:20:00.046
Total log time=6568.50[s]
Total flight time=6567.00[s] 100.0% of log time
Autonomous flight time=0.00[s] 0.0% of flight time
Average groundspeed=37.2[km/h] 10.3[m/s]
Min air temperature=30.24[C]
Max air temperature=31.51[C]