Defence firms, police forces and fire services are among more than 130 organisations that have permission to fly small drones in UK airspace, the Guardian can reveal.
The Civil Aviation Authority list of companies and groups that have sought approval for the use of the unmanned aerial vehicles, UAVs, has not been published before – and it reflects the way the technology is now being used. The BBC, the National Grid and several universities are now certified to use them – as is Video Golf Marketing, which provides fly-over videos of golf courses.
Including multiple or expired licences, the CAA has granted approval to fly small UAVs more than 160 times.
"People are going to see more and more of these small vehicles operating around the country," said John Moreland, general secretary of the Unmanned Aerial Vehicle Systems Association (UAVS), a trade body with more than 100 members. "There are any number of uses for them, and the technology is getting easier to use and cheaper all the time. These vehicles can operate anywhere in the UK, within reason."
I hope you enjoy Episode 4 Newbies Guide to Diydrones.com please let me know what you think of it. Suggestions and tips to make better videos and guides is always welcome. I am always willing to learn new things so please don't be shy. If you enjoy my videos Subscribe to My Youtube Channel!
Posted by Daniel Chote on January 25, 2013 at 9:30am
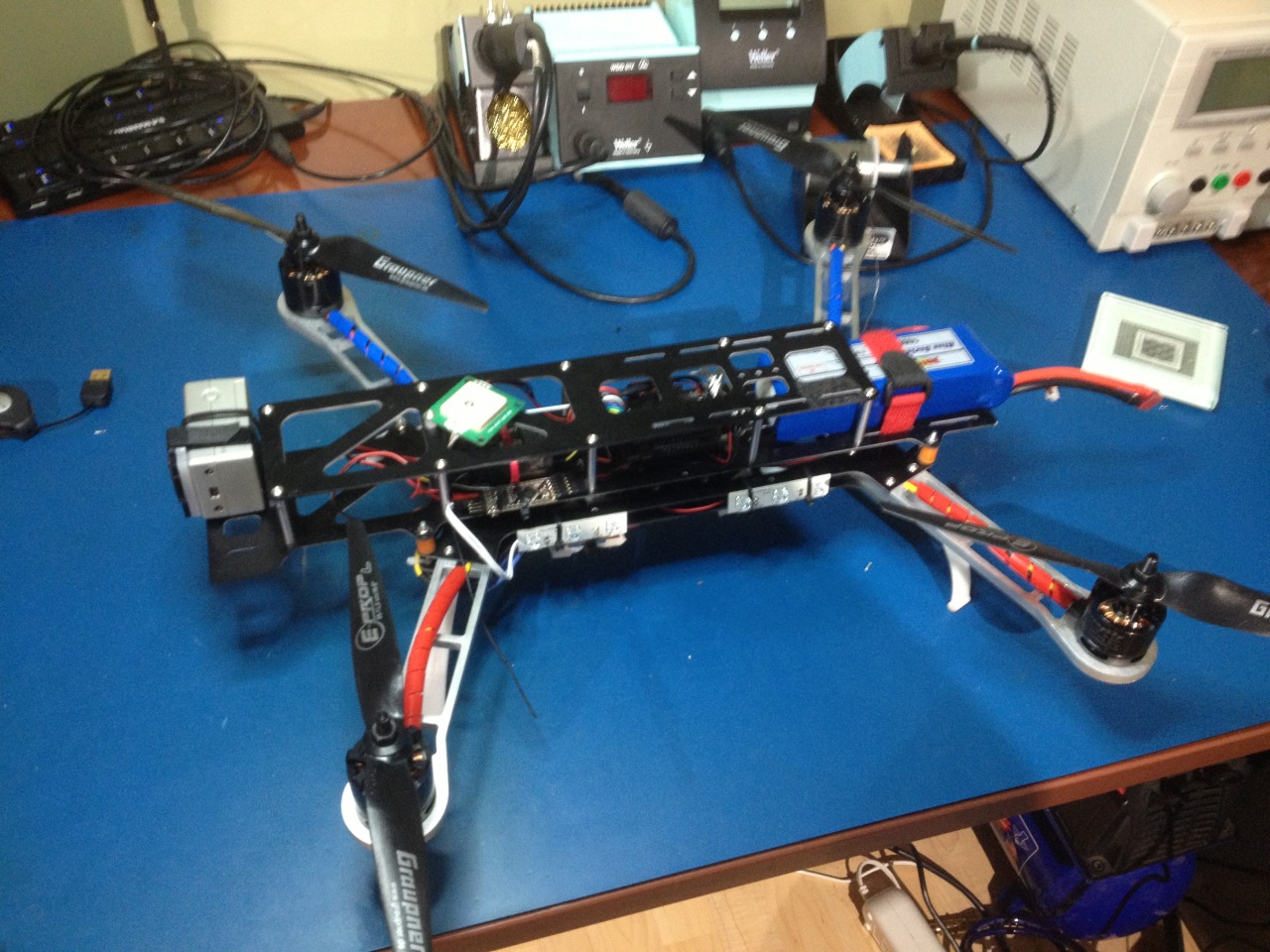
I finally rebuilt my ATG-700-AL Hexacopter, and got around to moving my QAV500 over to the Graupner receiver. Now that both platforms were functional, I decided to get stuck in to 2.9 and hott-for-ardupilot. hott-for-ardupilot is some code and user hooks to send telemetry data from APM back to the Graupner transmitter, its fairly light, and Graupner has a fairly well documented protocol.
Graupner is no stranger to most non-US people, but has very little penetration in the US market due to lack of distribution (i think). I have been thoroughly impressed by the build quality of the TX, all the components are firmware upgradable via USB and windows software (hooray vmware). Following the instructions on the hott-for-ardupilot wiki, and putting in the extra UART headers on the APM, things were very much plug and play.
2.9 compiled with the hott-for-ardupilot module without issue, after firmware was done, i reset both boards and proceeded with the 2.9 first run process (level, then accelerometer calibration). Of note, the mission planner UI button didnt work for me, it just stuck on "Initializing APM", however using terminal worked without a hitch both times.
The hexacopter has a camera gimbal, it took me a while to figure out how to make it work right, as the instructions on the wiki and the settings page in mission planner isnt exactly straight forward, but I eventually figured it out and got it pretty spot on as far as the bubble level was concerned.
Both maiden flights on 2.9 were straight forward, the hexacopter required no auto trimming, it was solid. The QAV500 took quite a bit, about 5 minutes of flying to trim it out correctly, but the autotrim function worked great. When I re-armed and took off it was solid (as you can see in the vid below)
Please excuse my N00b flying skills... Im still pretty fresh with flying!
Hexacopter:
QAV500 Quadcopter:
Overall, my first impressions of 2.9 are awesome, its a great advancement for the project, and im sure all the developers are excited by this. My thanks goes out to them!
You can find the build posts for both projects on my project blog.
Posted by Sean Headrick on January 25, 2013 at 6:30am
I started to document some flights wth HUGO this week . Here is some footage of "loiter" and "stabilise" flight modes.Also took some decibal readings from approx. 10' to 1.5'. The dB level never exceeded 95 dB. This is not a scientific test. I hope to show a comparison with open frame as a control and get some proper testing procedures in place.
I have been using a single axis gimbalfor FPV , and have found the compensation in this axis to help with my field of view while flying forward at moderate or high pitch. Plans for a vacuum formed enclosure for the camera is in the works.. There will also need to be changes made to the center hub cover to accommodate the 3DRadio.
I look forward to getting this available soon and ,as always,appreciate your comments and suggestions on the design.
Posted by Gary Mortimer on January 25, 2013 at 6:00am
An sUAS News podcast exclusive, with Gus from IsisCopter. They have petitioned the FAA for an exemption.
Docket No.: FAA–2012–0897 Petitioner: IsisCopter, LLC Section of 14 CFR Affected: 14 CFR 21.191 and 91.319 Description of Relief Sought: IsisCopter seeks relief to operate small unmanned aircraft systems within visual line of sight of the pilot in command for commercial purposes.
If you have any questions please send them to patrick@suasnews.com
Posted by Joshua Ott on January 25, 2013 at 12:00am
I prefer to use bullet connectors between motor and ESC. Lot's of folks use solder on these joints for a very good reason. One loose connection on a multirotor motor circuit can spell disaster. In addition to the possibility of a loose connection, it is often the case that the heat shrink insulation can leave a small gap between the two parts of the bullet. I want all my electrons to stay where they belong : /
So here is a solution to both issues:
Break out the manual 3D printer(hot glue gun)
Cut out a piece of silicone sheet to use as an ad-hoc mold
Apply a small bead of the glue and use the silicon to shape a thin film evenly around the joint
Peels off cleanly when you need to break the connection.
For fellow wire haters out there, here's a way that I figured out for attaching a 6 channel Hobby King receiver directly to the APM 2.5 without those pesky wires and connectors. The complete assembly of the APM 2.5 and the receiver is now only 18 grams and the clutter of wires goes away. I've flight tested this setup with the Turnigy 9x and it seems to work exactly as it did with the larger Turnigy 9x V2 8ch radio, less about 20 grams of stuff.
Here's a link the receiver I used if you're interested. I simply disassembled the case removed the old connector and used the connection that came with the APM 2.5 (with two unneeded connections cut off). You will also notice a bit of strain relief that I added to the receiver antenna, as that connection is now a bit exposed with the packaging removed.
The one thing that I still need to figure out is how to either make the three position switch on my Turnigy 9x transmitter connect to channel 5 or have the APM software look at channel 6 instead of 5 for flight modes, as I previously connected channel 6 on my receiver to channel 5 on the APM. Any suggestion of ideas on how I might do this?
First post in what will hopefully be a short series, cataloging the more dramatic learnings of a QuadCopter rookie.
This was planned as the last flight of an excellent day near the beach, and turned out to be exactly that. The prop was clearly loose, but the increased load factor resulting from an over-confident pilot throwing the controls around, plus having just switched to the 'big' LiPo (4400mAh) didn't help.
Damage report: two bent legs (easily repaired), two cracked props (rear), one humbled driver (yes, there was an audience). I found the lost prop, undamaged.
I had fun designing acrylic arches to build a protection cage (and GPS holder on top) in the style of the classical arducopter frame. The base frame is a 3DR quad revision C.
I added also a bottom plate beneath the battery space to attach cameras and gimbal.
You see on this second picture where I attached the 3DR telemetry antenna. On the opposite side (as far as possible from this telemetry antenna and as far as possible from the sonar), I will attach the video Tx antenna.
Still to do : I will use EMI shielding shrink tube (that product is great) to shield every cable and also the ESCs. This will probably reduce interferences on the sonar and antennas.
You also notice I have inserted two layers (a silicon layer and a soft foam layer) of materials beneath APM2.5 case to protect against vibrations (the case is strapped down with two velcros).
Those interested can download here the SVG files for laser cutting these acrylic pieces :arch%20modifie.zip
There has been recently news about uses of PX4 (APM/ACM port and James Gopperts post on state estimation control), its time to recap the platform state and to give an overview of the current roadmap. There are a few important hardware highlights:
PX4 as a platform tries to provide more robustness (on the hardware level), more flexibility and a modern software application interface. All this allows to implement new functionality that has been limited so far, most importantly it however decouples the platform (operating system, sensor drivers) from the application software (state estimation filters, controllers).
We're moving from a monolithic block where everything is closely coupled to a design where you have an operating system and apps that have individual functionality. It allows you to mix different apps from different developers and projects, and as developer it makes it easier to write software for it (a POSIX-style API quite similar to e.g. MacOS or Linux and a middleware API somehow similar to ROS, but more efficient).
Therefore besides from the actual PX4 platform (OS, middleware), there is also a complete autopilot stack (in fact by now already multiple controller / filter choices, plus the APM port).
We have by now test-flown all of the onboard fixed wing controller choices, and went out today to test the newly contributed Kalman filter based attitude and position estimator plus fixedwing controller from James Goppert. All in all the flight went well and smooth in manual and stabilized mode and we'll take the plane out for autonomous flight tests this weekend. Now that the core infrastructure is in place and reliable, expect much more progress on the autonomous flight, both from the APM port and from individual developers contributing new controllers and filters.
*over the couple month's I'm going to attend, organize, and film robotic conventions in my area*
This is my blog to the newscasts I'm going to be releasing every couple days. If you have anything you would like me to cover in a newscast please let me know through message or comment. As DroneCafe and The Daily Cup evolve over the next month so will this blog. To show my support for diydrones.com I am going to wear a diydrones.com t-shirt in every newscast. I love honest criticism so if you have any suggestions please don't be shy! (The newscasts over time will become more professional looking)
I'm really focusing a lot on the non military aspect of drones in my newscasts. I am going to focus even harder on trying to be a daily face reminding diydrones.com members to feel obligated to inform the uniformed that drones aren't limited to destruction. Please help support me in my efforts.
Editor of The Daily Cup (Newscasts) - Joshua Johnson
Posted by Gary Mortimer on January 24, 2013 at 1:30am
Thought sUAS News ought to catch up with this hangout thing. I will have to talk to Duran again as I did'nt do a very good job. He explains his frames and has people looking busy.
If I am very honest I don't understand Google + yet. I have several people lined up to talk to and in the future would love to have folks join in.
The Shed section of sUAS News should start filling with reviews, I have a couple to do and Myron and Gene are currently flight testing one of those Penguin FPV birds.
If you have a product you want to tell us about then let me know gary@suasnews.com it's pretty low quality, perhaps as a result of my slow connection or maybe that's how it is.
Posted by lianpinkoh on January 24, 2013 at 12:00am
This is a 15-minute short film about Zuzana’s journey across parts of Madagascar with a drone, shining a spotlight on environmental and livelihood issues on the red island.
It is a fascinating and personal behind-the-scenes look at the challenges of conducting drone missions in the tropics. Zuzana had never operated a drone nor even flown a remote controlled plane before.
Posted by apocolipse on January 23, 2013 at 10:30pm
Associate Professor of Aeronautics and Astronautics at MIT Missy Cummings dropped a line to DIY drones on The Daily Show with Jon Stewart tonight, not necessarily the most direct mention but she said "you can go to Do It Yourself Drones dot com and build your own..."
http://www.thedailyshow.com to watch the whole episode, the interview is a bit interesting on military aspects of drones.
Posted by Richard Evans on January 23, 2013 at 6:18pm
On the day the world ends (12-21-2012)
I got my box in from Udrones yesterday, haven't started setting it up or adding options yet, but I have begun familiarizing myself somewhat with how to proceed and found the online manual here. It is very comforting to know there is a very good source of help and documentation as to how everything works.
I have had my FW-450 tuned and working great for some time now so i'm not impatient to get in the air with this new quad so I will take my time and really do a good job of setting this one up. There are a few things I have coming before I have the complete parts list. I plan to pick up the receiver today, I use a JR 9 channel 2.4GHZ radio (9303) and probably will use a 9ch receiver by JR, or a Spektrum 8ch.
In my other Quad, I am using a DSM2 receiver, but since the transmitter is DSM, I am not getting the full benefit. However, I have to say that I have never had one range problem, but still, it is tempting to update and get a newer radio. Perhaps, i should move to one of the long range systems, but then I feel like i'm burning money too fast! .
Besides today (12/21/12) is supposed to be the end of the world, so would it really be a wise investment?
If today is the end of the world, I hope I get enough notice that I can get my drone in the air in time to get some good video footage, I have it in the trunk of my car with all the batteries charged and ready to fly at a moments notice!
If things work out, I will still be here to post more progress reports on my new UAV. I have a MinimOSD shipping, and have a camera gimbal backordered from Udrones that I will add when it gets here. I have the telemetry option and look forward to learning all about that.
if the world doesn't end today, I will be setting up my flight modes and finishing the setup and start on the FPV setup if the transmitter comes in today. (probably won't) I have ordered an Immersion 600 mw 5.8 ghz transmitter and will be using a Sony 450 line camera with a wide FOV lens for FPV flight.
I don't want this post to be all text, it needs an image or some color, so here is the token picture... a shot from a single frame of a some video I took with my GoPro HD 2 with my FW-450
2nd installment 12-22-12
Well the Mayans were on drugs.. they probably just had a short memory loss and never finished the calendar which really had us sweating bullets yesterday. Anyway that means I get to complete my ArduCopter,
yesterday, things just weren't working!!
I couldn't get the mission planner working and spent about 8 hours trying until finally giving up on using Windows XP.
The drivers don't install correctly on Windows XP, but work great on Windows 7. For anyone else having this problem, don't spin your wheels just find a Windows 7 machine you can use.
After installing the driver, the com port didn't appear by the driver name. When plugging in the cable for the first time, it says "found new hardware", but never completes loading the driver, and the any attempt to load or unload the device manually fails and locks up the machine until you pull the USB cable. the it frees up the system immediately.
It would be good if there was a fix for this for those who only have Windows XP, but I'm ok and have moved on.. Working on more stuff today, going to remount the Telemetry board and compass, they mounted with some real crappy velcro, and I like a tidy installation. Then I am going to tackle installing the receiver and setting it up in the mission planner along with flight modes. I decided on the Spektrum AR-8000 and picked it up at the local hobby store yesterday
Will post when I get more done!
3rd installment. 12-22-12
Ended up flying it after this little video was made (In the living room) It seems stable and no bad habits.
I am disappointed in the props, motors and collets that are provided. The long 1/8 inch motor shafts and compression fit collets are recipes for problems. The worst problem is these collets can leave the motor shaft if they loosen and that is bout to happen if you don't check the before every flight. Also, it is impossible to get the running smooth with zero runout. I will replace them, probably with DJI motors and collets. DJI really has a good system in their design.
I did fly it though with the ones provided and It flies fine.
Here's a little walkthrough of my progress so far;
4TH installment:
Waiting..... The weather has been bad for Flying Quads here, and I am waiting for 2.9 firmware.. I have things working pretty well, but Loiter isn't really working now, and I understand it is improved much .2.9
The latest thing I did was Monday, I replaced the motors that come stock on the ArduCopter with motors and propellers from DJI. The original motors and collets were unsatisfactory to me, and have lots of vibration. This is unavoidable when using 1/8' shafts with compression collet. DJI has a great system that eliminates vibration and provides a very secure mounting arraignment for the propellers. Although the RPM/volt was slightly different, without any PID adjustments, I couldn't tell any difference in stability or performance. That was fortunate, as I am not experienced at tuning. Looking forward to 2.9, and will be checking every day. Once I am happy with the autopilot performance, I will get the FPV part going, and also venture into using waypoints, using MP to send flight commands, and autonomous flight. In the meantime, flying my micro quad in the living room!
5th Installment:
I've been anxiously waiting to see the official 2.9 firmware. I am used to the rock steady naza and until
i can get that with the APM, My camera stays on the flamewheel with the naza. I decided to go ahead and set up the FPV, so as soon as my camera came in, I got the MinimOSD out of the drawer, and the 5.8 ghz transmitter (Immersion) and made up some cables. and started linking it up . I planned to make a y cable to allow the OSD and the 3DR radio use the telemetry at the same time.
os began linking up the components one step at a time. the last connections was to be the y cable to the telemetry port. I monitored from a 5.8ghz receiver, first just the camera to the transmitter, all was well the image looked good on the monitor. (12v camera, and I uses a 3S lipo for power for the Transmitter and the camera).
Then I connected the 12V side of the minumOSD to the camera and to the transmitter as it shows in the Wiki.
Initially, I got the OSD initialization on the monitor, it booted up and then displayed "waiting on Mav" but the camera video was messed up, it looked like it was out of sync of something in the background of the OSD text display. I had already seen a good video image from the camera in the preceeding step so I checked my wiring and all looked good, then after a couple of minutes the monitor suddenly went blue screen. It seem like the transmit went out..
After backing up, I found that the camera still worked fine, the transmitter and reciever and monitor all check out, but the OSD quit working. I put my finger on the board and it was hot enough to burn my finger somewhere down around the LED. Not sure what is was, those little SMD's are so small!!
so somehow my MiniumOSD fried within 5 minutes of powering it up. I have ordered another one, so I need to make sure I'm not doing something wrong so I don't blow it up.
The only thing I can think of is; I made an assumption that the 12v+ and GND terminals are bused together and so it doesn't matter of the 12 volt source is on the in set of pins or the out set of pins (as it related to video in/out) from looking at the circuit board it looks like they are. In the wiki it shows the 12+ tied to the supply + feed to the camera,
For wiring simplicity, I did it slightly different. I connected the 12+ for supplying the transmitter, to the lead going to the MinimOSD on the out, going to the out pin set, assuming that the +lead to the camera would receive its 12v across the buss. If these are not bussed and they the 12v in is filtered or regulated or something like that than perhaps I blew it!..
If they are bussed, then something else happened. Anyway, as soon as the new OSD board comes in, maybe I will have some "eyes"
Richard
6th Installment... Update
I got the minimOSD in so I will soon restart that installation. Also, the main thing I've been waiting for has come to pass. The 2.9 firmware official release is out. I uploaded it last night, but it was late and dark, so I wasn't able to test fly it until a brief flight this evening just as the sun was retreating.
congratulations to all the developers, There is a world of difference. The main thing I was hoping for is a good Loiter mode. although on take off I noticed right away that in Stable mode, the controls have more authority, I got used to that pretty fast. Then when I switched it into Loiter, the yawed about 45 dg. but it stabilized and aggressively held altitude and position. That was very good to see! There are a few things I didn't expect though. I'm sure they can be explained. I noticed that in Loiter mode, I could override and coax it to a new loiter location, but it would work its way back to the original position. I thought that was odd, It wouldn't seem to me to be the desired behavior. To confuse me I'm sure, it didn't do that ever time, at least once, I was able to move it to a new position and it did lock in on the new location.
I will have to test that some more to see whats up and see if there is some consistency in that behavior.
Other than that, it is beginning to look like it has the stability I need to be confident to explore it much deeper.
I am looking forward to this weekend when hopefully I can give it a mission and see what it can do. Also, maybe I get get the FPV system and OSD going by then.
By the way... I mentioned early about the floats I added to my other Quad (not the ArduCopter) because I fly over water a bit, so I wanted to add some floatation. I realize it probably won't save my electronics, or at least render it untrustworthy, but at least if it floats, I have some chance of at least finding the wreckage. if it is a very soft landing, perhaps It could survive. I haven't water tested it yet. I cut up some of the pool noodles that are popular water toys, and attached them to the extended legs on my Quad. A very cheap and easy way to provide some flotation!
Hi VirtualRobotix! We met you at Modena Makers, it was a very interesting experience, we had the opportunity to see your amazing technology!
We present you Axemblo, the new open source construction system for professional DIY Robotics. Axemblo system is based on Aluminum, a lightweight, ultra-resistant and recyclable material. With Axemblo you can create fantastic Robots, Rovers, mechanical arms and supports for Electronics Boards (VirtualRobotics board fits perfectly).
Axemblo is released under a Creative Commons Attribution-ShareAlike 3.0 Unported License to enable students, researchers and the community to expand the system. Looking forward for a collaboration with you. We would also love to hear from the community it would be very useful for us to know what they think about our system.
Great work VirtualRobotix
During Modena Makers we meet the founder of Axemblo project . We decide to support their project and try put on their Rover a VRBRAIN with ArduRover2 firmware.
Posted by Richard Evans on January 23, 2013 at 7:30am
I have an ideal opportunity this weekend to get some good video at the coast. I have been wanting to do this for months but the winds are almost always 15-20 MPH or more.
This weekend they were light and the sun was spectacular. I used my DJI FW450 with the GoPro Black edition, and used a Sony camera as my flying cam and my fat shark glass's using 5.8 GHZ were my FPV link to the craft.
here's a short flight around the Marina where I keep my boat "Da Kine". you will see it early in the video as I fly straight to it to see if I can get my better half to come out and say hi!
Posted by Gent Armedo on January 22, 2013 at 11:30pm
Stoked that after six months in the drawer, my APM 2.0 flew again. I mounted it on an HK 666 quad frame and loaded the Arducopter 2.8.1 code. It flew just fine with stock PIDs.