We are finally having manufactured a "shield" board for the Arduino platform that interfaces a Centeye image sensor with an Arduino to form a true (if simple) "smart sensor". This particular version is about a simple as you can make it:
We are finally having manufactured a "shield" board for the Arduino platform that interfaces a Centeye image sensor with an Arduino to form a true (if simple) "smart sensor". This particular version is about a simple as you can make it:
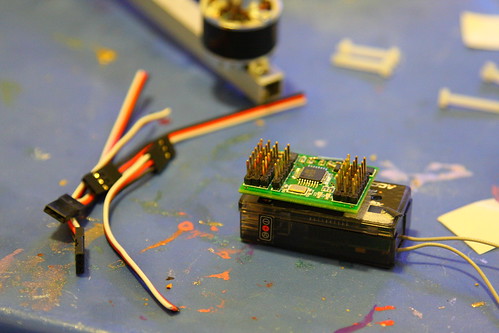
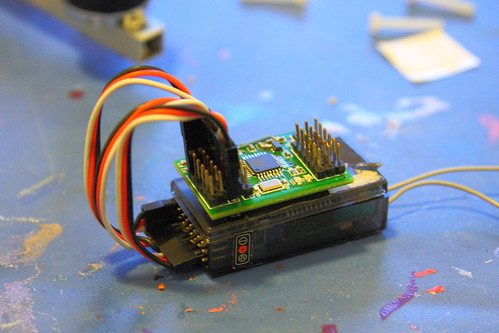
Shield Board: The board itself is a simple 2-layer board, and can be connected to either a full-size Arduino board (we've so far tried the Duemilanove and the Pro), or a mini-sized version (we've tried Sparkfun's Pro Mini). You need a 5V board to power the image sensor.
If one doesn't want to use the board with an Arduino, it is of course possible to just use it as a breakout board for the image sensor chip. The board design is open source.
Image Sensor: The shield board is compatible with any of Centeye's current image sensor chips, but for the above version we are using the Tam series- These are very simple image sensor chips requiring only five lines- Ground, Power, Clock, Reset, and AnalogOut. When you pulse Reset, a counter on the chip points to the first row, first column pixel, which is output as an analog value. Pulsing the Clock line advances the counter to the next pixel row-wise. That is it. The chips are available in two resolutions- Tam2 at 16x16 and Tam4 at 4x32, the latter with rectangular shaped pixels. I've also taken a leap of faith and decided to publish the schematic of the chip! We've released the analog portion down to the transistor level, and the digital portion down to the gate level.
Right now we have about 200-250 each of the Tam2 and Tam4 chips in stock, in bare die form.
Optics: The sensor will be shipped with a micro lens (about 1.6mm)- we can ship the board with the lens mounted or unmounted. In the latter case the Tam4 chip will be open and exposed, which is appropriate for people who want to use their own lens.
Sample code: I've also written a sample Arduino sketch that illustrates acquiring an image, obtaining a fixed pattern noise mask, and computing one dimensional optical flow from the 4x32 Tam4 chip. By cutting out the serial monitor and acquiring/computing optical flow on just one 32-element row, we obtained more than 200 frames per second- I think more is possible with further optimization. The source code is "open" and is intended to be a starting point for developing your own application.
Uses: I didn't design this board for any specific application, but it should be able to do some things of interest to robotics. I've come to appreciate that it can be difficult if not impossible to make a "one size fits all" sensor, even if supporting just one mode (like optical flow). This is because there are many parameters that must be adjusted for each application. Thus for this board we are taking a different approach- rather than try to hide the optical flow computation from the user, we want the user to be fully aware of what is going on. In order to really use this sensor, you'll have to do some hacking of the code to tailor it to your application. I'll be honest- this is not for those who are afraid to hack a bit. But I think the Arduino environment makes it very easy to hack, play around, and try different things. I'd appreciate your feedback on this approach.
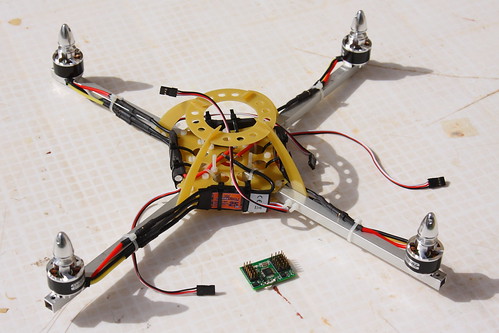
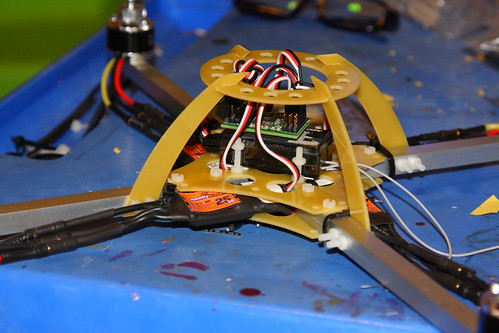
As for what I think the board will ultimately support (with some hacking)- in the context of robotics and drones I think that things like wall following or basic terrain following should be doable (if on a forward moving platform). Several sensors should support some basic obstacle avoidance against large obstacles. Fulfilling the role of an downward optical flow sensor for a quad might be doable, but would require some careful optimization and algorithm tuning. I don't think impossible though- If the classic 1980's video game Defender could run, with rendering, on a 2MHz processor, then I would imagine adequate optical flow for a quad could be done with 16MHz. Please note though that I haven't tried any of these things yet with this board.
Just so that you know megapixels aren't needed- here are a few facts to consider:
1) Most flying insects have from several hundred to several thousand pixels. They have at most "kilopixels"! 2) We demonstrated altitude hold in 2001-2002 with 16 to 88 pixels, and obstacle avoidance in 2003 with 264 pixels total. 3) We also controlled the yaw angle of a helicopter with 8 (eight) pixels.
For the released files (including the Tam chip schematic), please visit this posting at Embedded Eye. For other details including purchasing, please visit this page at Centeye. Current asking price is $100 per board plus $9 shipping/handling for US customers. We hope we can lower this price in the future as we learn to automate working with bare die and the lenses in the current manner we use.
Please feel free to ask questions.