The Walkera Magic Cube is used to control Walkera models with either a Walkera remote control or using an Android app. We wanted to control the Walkera Ladybird with a computer so we started to investigate how to interface the Magic Cube work with a computer. After some tinkering and dome dead ends we ended up generating a PPM signal using an Arduino. The proof-of-concept setup for this is depicted above. This allows us to send commands via serial to the Arduino which in turn controls the Ladybird using the Magic Cube. The code used to generate a PPM signal which is accepted by the Magic Cube can be found on a GitHub project page. The wiki for this project also contains some further explanations on how to recreate the setup. Some experiments and data regarding the reverse engineering of the Android app and its protocol can also be found there (see the early_attempts branch).
All Posts (14049)
Sort by

There have been discussions before calling for reliable and accurate alternatives to GPS. The Vikings may have had the answer without knowing the physics. They were adept navigators at latitudes where frequent cloudiness and low sun angle(winter) could have made direct observation of the sun difficult. Legend has it that they had a magic stone, called a Sunstone, that allowed them to navigate by the sun even after dark. You're wondering how maybe, and I'm wondering when will this be available on a chip.
...During a question-and-answer session with "3D Robotics" editor-in-chief Chris Anderson, Musk said that affordable commercial space travel will never be possible with the current model, which relies on single-use booster rockets.
http://www.cnn.com/2013/03/09/tech/innovation/elon-musk-sxsw/index.html
_________________________________________________________________________
Looking forward to watching this discussion, Musk seems like a pretty cool dude.
I have been reading with interest the sonar usage (right sensor, etc.) because I had already purchased the previously recommended sensor (EZ0) but had yet to add it to my quad. After reading the posts by Maxbotix and others, I went ahead and took the plunge. I added a 100uF capacitor directly to the board (photo above) as recommended and put a 100ohm resistor on the +5V line.
I created a cable and hand-braided it in an attempt to eliminate as much noise as possible. I know Maxbotix recommends a shielded cable but I didn't have any. The cable is also a little too long. I also temporarily mounted it to a paint stir and put it on the opposite side of the air-frame from the receiver. But as you can see from this photo, it is darn close to one of the prop tips too. But enough of that - how did it perform?
Here is the result of a test flight in pretty high wind.
The red is the sonar height, the green is the barometer height. At no time did the actual height get above 10m during my test.
First, I am continually surprised at how accurate the barometric height is. Second, the sonar trace has some decent readings for much of the flight, but sometimes is has crazy readings. I can't tell exactly what is going on here yet, but I'm going to track it down. I know the sonar I have is ultimately too sensitive and is probably picking up things like the mailbox (which was certainly nearby). Additionally, I wonder how likely it is to be hindered by heavy winds?
I'm going to do some more testing soon. I want to shorten the boom to get it further from the prop. If anybody has any testing methods they think are good for sonar units, please let me know.
When I received my telemetry radios and got them working with a minimum of fuss, I was thrilled. I quickly decided I didn't like the idea of having a bare board hanging off my Motorola Xoom tablet, though.
After a little research I located and obtained a USB dongle case that looked like it would fit. A little thought, a couple holes, and a slight mod later I had a finished unit that looks factory made. Presented in pictorial form below are my results, enjoy!
The DC Area Drone User Group participated in the STEM is everywhere event at Howard University on March 9 to encourage the next generation of middle and high school makers to get excited about science, engineering, and drones.
DC DUG Director of Online Operations Gustavo Ruiz Zastrow noted that showing off flying robots to students helped give them concrete examples of how math and physics could be applied to something exciting in the real world rather than just being abstract concepts on a page.
Students were excited by what they saw and we received requests to teach about drones in schools.
We displayed this custom lego frame to show that much of the drone can be built from materials that students are already familiar with.
Journalist Malcolm Brown interviewed DC DUG Director of Education Christopher Vo and filmed him flying. Malcom is producing a short piece about the commercial market for small drones that will appear on the PBS website in April or May. This video will also include an interview with DC DUG President Timothy Reuter.
I am impressed, three folks have thrown their hats in the ring, Richard, Rob and Randy. Other letters of the alphabet are allowed to compete.
Rob has managed to loiter for two minutes at each corner which is to be commended.
The image above is from Richards first attempt.
Catch up here
I built this Wire Rope GoPro mount out of a couple of Furniture leg coasters, a Bicycle Brake cable and some electrical brass wire connectors removed from their plastic housing. Test flown this morning and here is the result.
I'm very pleased with the video as I have tried many ways to remove the rolling shutter effect previously and this is by far the most effective. The video is shot on a GoPro Hero 3 Black Edition @1080p 60fps. I have also briefly tested it on my old GoPro Hero 1 @1080p 30fps and got similar results.
I'm flying the wire mount on a Reptile 500 quad Frame from Himodel.com and its on the APM2.5 stock 2.91 quad firmware.
After many flights with my DIY frame consisting of 3DR Electronics stack and Landings legs, all the other parts are homemade form aluminium, i thought it's about time to launch from my balcony and take a spin down to the lake...
How easy was that...
For those DIY Drones members who would like to get their children interested in the world of robotics, checkout this website: http://boingboing.net/2013/03/08/welcome-to-your-awesome-robot-2.html?utm_source=feedburner&utm_medium=feed&utm_campaign=Feed%3A+boingboing%2FiBag+%28Boing+Boing%29&utm_content=Google+Reader
This is what I have been waiting for!
Unfortunately the price might be an issue.
Here is their products page. I am glad to see that this is being considered for multirotor applications. It looks to be a rock solid system and will open up live HD transmission for news and sporting events.
http://boxx.tv/products/zenith/
It is technology like this that will make multirotors attractive to the TV industry.
Gdocs download: http://goo.gl/ernZI
here's a XBee XTend solidworks assembly to add to your models. Has mates so the antenna rotates and pivots 90 degrees.
follow link, click download in the upper left or Ctrl+s
Gdocs download: http://goo.gl/ernZI
Corey Upton
Staff Mechanical Engineering Student
Alaska Center for Unmanned Aircraft Systems Integration
Arduino is awesome, and the autopilots based on them are great. Not only do they support an incredible number of external devices, but also don’t scare away the novice developers. Easy programming and versatility are nice but the cost at which they come at is somewhat of a letdown. 8-bit Arduino processors don’t allow a lot of room for other computation. Having already crashed a very expensive hexacopter (http://diydrones.com/profiles/blogs/the-story-about-hex-and-people-behind-it), and being told off for doing something quite risky (http://diydrones.com/profiles/blogs/hex-get-me-my-coffee), we have realized the importance of safety in autopilots.
Algorithms related to safety often require implementation of vision algorithms and quick analysis of sensor data logs, and unfortunately Arduinos aren’t suitable for such computation. Better processors can allow such implementations and even though autopilots with better computation capability on their own are not enough to ensure safety, but they can provide a good basis to develop things, like obstacle avoidance, that can lower the risks of unwanted crashes.
Aside from the programming capabilities, there is one other flaw that a lot of current open source autopilots have, and that is, setting the PID values. It often takes a novice user weeks to get a copter to fly stably in presence of external disturbances whereas the same user can use a commercial autopilot and achieve stable flights in a matter of hours (or even less). Configuring open source autopilots often takes a while as well.
With the aim of creating an autopilot that achieves stability without a lot of tuning, and having a 32-bit processor and still supporting many external devices, ZeroUAV and HeX, together intend to initiate an open source autopilot that is based on the commercial YS-X4. We are not interested to reinvent the wheel, but instead are interested to solve the aforementioned flaws.
Licenses:
Software License: GPL v3
Hardware License: Creative Commons BY-SA
Hardware:
- Eva uses a 32 bit ARM processor.
- Onboard sensors include 3-axis gyroscope, 3-axis accelerator, barometer, and thermometer.
- Eva uses a very precise Analog-to-Digital Converter.
- Eva supports GPS and 3 axis digital gyroscope.
- Eva supports standalone power sources, and doesn’t need a UBEC connection.
Detailed Hardware Specifications:
Processor
Processor: AT91RM9200
ARM920T Kernel
Operating Frequency of 180 MHz, 200 MIPS
Cache: 32 KB (16 KB Data Cache, 16 KB Instruction Cache, Write Buffer)
Memory (SRAM): 16 KB
External RAM (SDRAM): 64 Mb
External DataFlash 512KB
IMU
Gyroscope: Uses two chips: LPR430AL (For X and Y axis), LY330ALH (For Z axis).
3-axis.
Measurement Range: ±300 dps.
Bandwidth: 140 Hz.
Stable output, and provides temperature stability.
High shock and vibration survivability.
Accelerometer: ADXL335
3-axis.
Measurement Range: ±3 g.
High Frequency Response; 1600 Hz.
Low Power Consumption (350 uA).
10,000 g shock survival.
Stable output and excellent temperature stability.
Barometer: MPXA6115A
Sensitivity: 45.0 mV/kPa.
Pressure Range: 15kPa – 115kP.
Stable output, and provides temperature stability (1.5% Maximum Error over 0o to 85oC).
Temperature Compensated from -40oC to +125oC.
High Accuracy at High Temperature.
Automatic Temperature Compensation.
Thermometer: LM335
Stable output, measurement error ±2%.
IMU Analog to Digital Converter:
ADS1256
24 bit (Precise up to 10 cm for barometer’s sampling).
Data Output Rates to 30kSPS.
GPS Module
GPS NEO-6
Sensitivity: -162 dBm
Maximum Navigation Update Rate: 5 Hz
Horizontal Positional Accuracy: 2.5m
Velocity Accuracy: 0.1 m/s
Heading Accuracy: 0.5o
Digital Compass: Honeywell HMC5883L
3 axis.
12-bit ADC enables 1o to 2o compass heading accuracy.
Maximum Output Rate: 160 Hz
Low power consumption.
Detailed Software Specifications:
- Extremely stable flight
- State calculation
- Gimbal support
- Automatic take off
- Way point flights
- Automatic interest point lock
- Automatic lock
- Ground Control
- Overload Control
- Automatic Navigation, GPS Navigation
- One key return (Using GPS)
- Care free flights
- Supports tricopters, quadcopters, hexacopters and octacopters.
- Supports GPS mode and R/C mode. Supports real time switches between modes, using an remote control.
All the schematics and PCB diagrams can be downloaded under a CC BY-SY license.
PCB Diagram:
Schematics:
Sorry this one took so long to get to you guys, i spent a lot of time packing techpods instead of building them.
in this one i build and align the tail. the next and final video will be the pod, that should be up soon.
This is the beginning of a project I've been thinking about for awhile. I'm making this blog post to encourage myself to get going on it. Spring is coming to Colorado, and I want to be out filming in the wild and remote reaches as soon as the snow melts!
This is a Surly Troll frame with an Xtracycle FreeRadical cargo attachment. I laced a lower kv hub-motor into a Surly Large Marge 65mm wide rim, that will allow me to run a big fat tire underneath all the weight I'll be carrying.
I have two separate battery packs in mind (depending on the mission), both are LiFePO4 16s for ~53V. One pack will be made up of 40Ah cells and the second one 10Ah. A voltage regulator will give me 12V for all the ground station needs.
The 10Ah pack is built already, including battery management system(BMS).
It will be necessary to modify the FreeRadical structure to make room for the 10Ah pack just in front of the rear wheel. The 40Ah pack will need to be mounted on the outside of the frame.
These Pelican cases will figure in to the mix somehow.
Maybe not the huge case, it's kind of ridiculously large.
This is the 40A ESC for the hub-motor

How do you define a drone? What's the difference between an RQ-9 Reaper and a quadrotor? Your pressing drone questions, answered
Posted 03.07.2013 at 3:30 pm6
RQ-9 Reaper and an Aeryon Scout Quadrotor The armed RQ-9 Reaper MQ-1 Predator, seen on the left, is visually distinct from the Aeryon Scout Quadrotor. The Reaper is also six almost eleven times as long. Wikimedia Commons
When an unmanned aerial vehicle reportedly flew within about 200 feet of an airliner earlier this week, outlets like Time and CNN chose to accompany their stories with a picture of the RQ-9 Reaper--this, despite that initially, there was no concrete description of the unmanned aircraft.
It's not terribly surprising that news outlets would default to an image of the Reaper; it's perhaps the most widely recognized drone in operation. But as more details of the incident surfaced, this simplification proved incredibly wrong. The unmanned craft is now described as a 3-foot-long quadrotor--a four-blade copter--which is wildly distinct from the 36-foot-long Reaper; a bit like the difference between a Johnny Seven O.M.A and an AK-47. That's when I realized: drones are really confusing. Even to people who get paid to write about them! So here's a primer on what is and isn't a drone, the differences between common types of drones, and a bunch of other stuff you need to know to sound smart talking about these things:
Where does the term drone come from?
When unmanned flying vehicles were first introduced to the U.S. military, the ability to control them from afar wasn't very sophisticated. So the first drones flew along pre-set paths, operating off an internal navigation system. This led to servicemen informally referring to any machine that flew without human control a "drone," and Germany still has some like this in service today. That said, the "not being controlled by a human" part of the definition has since been lost to everyday use.
What exactly are drones?
"Drone" as a category refers to any unmanned, remotely piloted flying craft, ranging from something as small as a radio-controlled toy helicopter to the 32,000-pound, $104 million Global Hawk. If it flies and it's controlled by a pilot on the ground, it fits under the everyday-language definition of drone.

Global Hawk: Wikimedia Commons
Wait, does that mean model airplanes are drones?
Almost! Actually, under the law as it stands, any unmanned, remotely piloted vehicle in the United States flown for hobby or recreational purposes is a model airplane, thanks to the 2012 FAA re-authorization act. In 2015, the FAA will suggest new, drone-specific regulations, at which point model airplane law and drone law will probably diverge. Until then, though, all small drones used by private citizens in the U.S. are legally model airplanes.
So is the military using model airplanes?
No. The military is not considered a private citizen, so it plays by different rules, and uses different terminology.
Okay, so what terms does the military use?
The military has described drones, variously, as Unmanned Aerial Vehicles (UAVs), Remotely Piloted Vehicles (RPVs), Unmanned Aerial Systems (UASs), and Remotely Piloted Systems. (The FAA uses some of these terms, too.) The difference between UAV/RPV and UAS/RPS is that the former terms refer to the vehicle itself, and the latter terms describe the vehicle as well as the pilot and support staff. These are useful distinctions for specialists, but not for regular people.
What are the different types of drones the military uses?
The United States military alone maintains three different classifications, one each for the Air Force, Army, and Marines. Part of the confusion in drone terminology is overlapping and competing definitions. The Air Force files drones under five different tiers; the Army and the Marines file drones under three tiers, and none of those tiers perfectly overlap. That's boring and technical. Instead, here are some of the most commonly used or iconic drones:
RQ-11 Raven The RQ-11 Raven weighs 4 pounds, is launched with a throw, and is piloted with a hand-held unit that resembles a video-game controller. The Raven isn't the most iconic military drone, but it is probably the most used: more than 19,000 have been built. It's mainly useful for seeing around corners and sending footage of rooftops back to troops moving through a city.
It also looks like an awkward model airplane, and it breaks apart like LEGOs when it lands:
RQ-7 Shadow The RQ-7 Shadow is approximately man-sized, and can fly almost 80 miles away from its commander while providing near-instant video to give a good picture of the battlefield.

Shadow 200 : Wikimedia Commons
MQ-1 Predator and MQ-9 Reaper The MQ-1 Predator and MQ-9 Reaper are the most iconic drones, and odds are if there's a news story about a drone, it's going to have a picture of one of these. These guys can be armed so that makes them largely, though by no means exclusively, the preferred tool for what we call drone strikes. The main difference between them is that the newer Reaper is larger, has a more powerful engine, and can carry much, much more. They still both look like someone slapped a giant wing on a match, though.

MQ-1 Predator UAV: Wikimedia Commons
Rq-4 Global Hawk The Rq-4 Global Hawk is the leviathan of the drone fleet. As mentioned above, it weighs more than 32,000 pounds, has a 130-foot wingspan, and can fly for more than a day. It can reach up to 60,000 feet, and from high elevation it can take high-resolution images of the land below, as well as detect and track moving targets.
Aeryon Scout Though not in use by the United States, let's take a look at the Aeryon Scout. It's a small quadrotor that NATO allies supplied to the Libyan rebels in the recent campaign to overthrow Gaddafi. The scout weighs less than 3 pounds and can fly for about 25 minutes, making it useful for checking around corners. It's operated with a touch screen, too.

Aeryon Scout: Wikimedia Commons
That's by no means a comprehensive list of military drones, but it should get you through a dinner party.
What about private industry? Does it use simpler terms?
As of last week, yes! Not because the drone industry doesn't have weird or obscure terms, but on Friday the drone lobbyist Association for Unmanned Vehicle Systems International (AUVSI) conceded that "drone" is what people are calling unmanned aerial vehicles, so "drone" is now begrudgingly the industry term.
So what should I call them?
Ultimately, depends on your audience. In everyday conversation or casual writing, "drone" is fine. If the audience is military or industry, or knowledgeable policy makers, it might be best to skip the informal terms, crack open Google, and figure out exactly how these people are going to talk about flying robots.
taken from: here
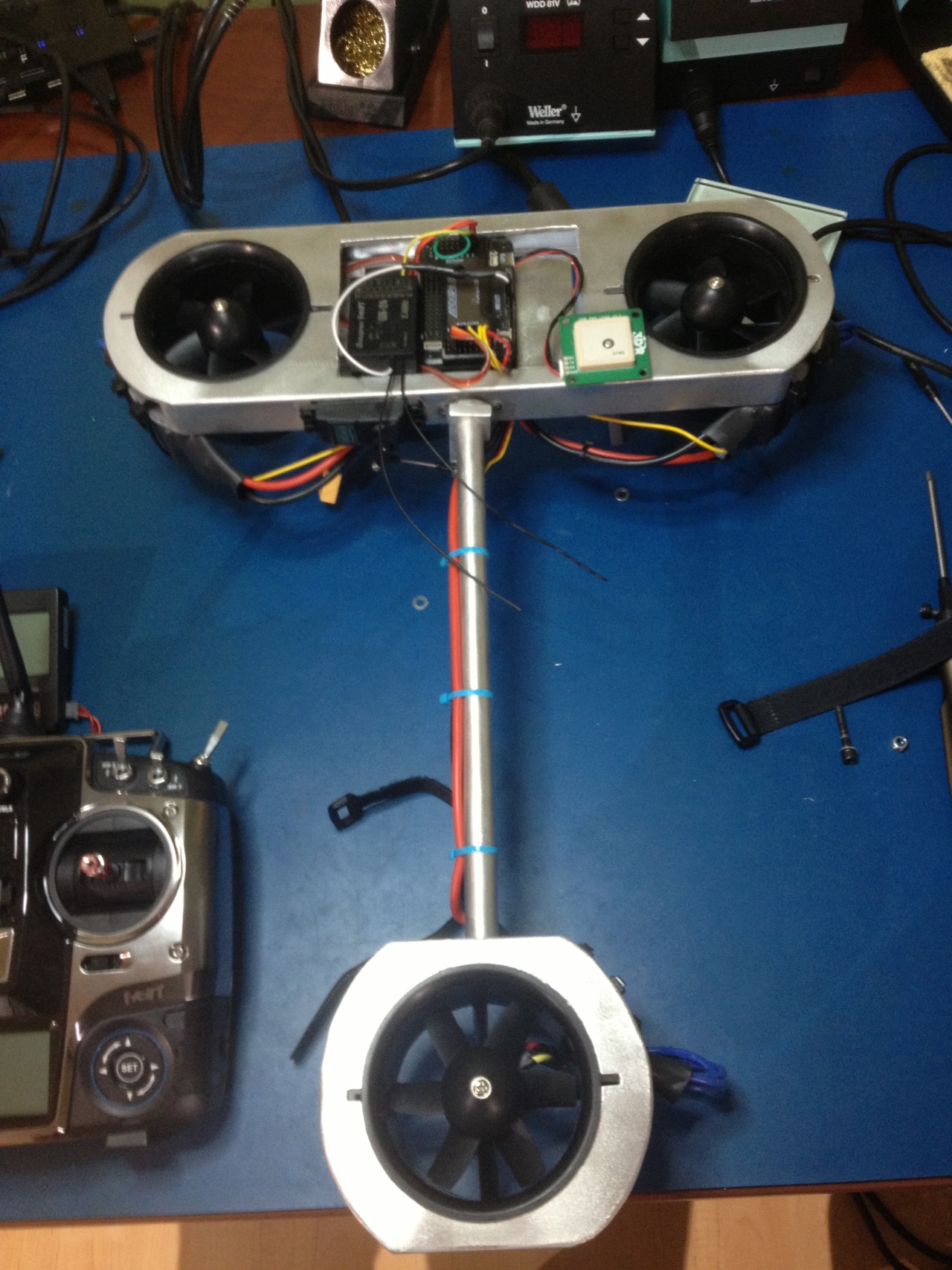
Primary outline of parts/components are on my tumblr blog: http://projectable.me/post/44872817314/project-edf-tricopter-assembled-plus-first
I really wanted to build something with ducted fans... And I also really wanted a tricopter for its yaw control (great for video). So after contemplating a hover tank quad for a while, I decided that a tricopter would be smarter (also way less involved! I will probably come back to the hover tank at some point :P).
I had the basic frame design come to me after I started to shape the front section. I decided, since I had so much space in the front portion, that I would put the tail control servo up the front and articulate the entire tail.
Summary:
- All aluminum hand built frame, with full tilt tail boom (bearings for smoothness)
- 3x 70mm ducted fan units (CW & CCW) powered by 2300KV motors + 60A ESCs on 6s battery!
- APM 2.5 running Arducopter 2.9-dev (git 3/8/2013) + hott-for-ardupilot classes (for telemetry)
- Graupner GR-24 receiver running PPMSum (yay 1 wire)
- Weight: 3lbs 4oz (4lbs 4oz with 3200Mah 6s battery)
I am amazed that this flew with default 2.9 PIDs… One thing to note, which I am sure some tuning will help, is it starts to pitch and that pitch builds until stick correction is no longer enough (which is what happened in the vid). I hope its not electro magnetic interference from the motors… I would figure the aluminum around everything would act as a shield to some degree.
For my full build log of the project, check out my blog: http://projectable.me
Hello Everyone,
I've recently had the chance to get some basic acrobatic moves scripted for fixed-wing airplanes. They are far from perfect, but I wanted to share.
In the (slightly choppy) video, you'll see a left roll, a right roll and most of a loop.
Let's talk a bit about how to set this up:
1) You need a Hardware In Loop (HIL) setup. I use X-plane. There's a good tutorial on setting up a X-plane HIL configuration here.
2) All of your regular controls and modes should work properly in the simulator.
3) You need a python based script. You can start with the one I've put together. It's attached here. "simple_script.txt"
4) With X-plane, the APM Mission Planner (MP) and the script open, get your plane in the air and press "p" for pause. "a" will put you in chase view ("w" to go back in the plane) and "-" and "=" will zoom your view of the plane in and out.
5) In the MP click on the "Flight Data" button, then select the "Actions" tab underneath the Heads-Up-Display.
6) Click on the "Script" button. This will bring up another window with a preloaded script (for arducopter). Switch to the already open "simple_script.txt" and select-all then copy.
7) Go to the python script window and paste "simple_script.txt" in the python script window. DO NOT close it yet.
8) Go to X-plane, and press "p" again to un-pause the plane.
9) Go back to your python script window and close it. This will trigger the execution of the script when you click "yes" in the pop-up.
10) Watch your plane do some rolls, and most of a loop.
Let's also talk a bit about issues and my thoughts for the future.
1) I do not seem to get RC control back after the script has run. I'm not sure what's going on here.
2) (IANAP) I am not a programmer, but I feel like we should be able to create python classes (objects?) that take pertinent arguments. For the roll class it could include (direction, rate, duration) and the class would handle the slight down elevator when inverted, etc...
3) It also seems like we could effectively have another PID type of structure in the scripts that would give us smooth loops. I'd like to see us just pass two arguments to a loop class, size of loop, and what direction. 0 is perpendicular to the ground up, 90 would be a flat loop parallel to the ground going to the right, 270 to the left.
4) Is there a way to temporarily make stabilize a negative value? This would seem to give us solid inverted flight.
5) Eventually I envision an "Acrobatic Move Repository" where we can keep moves for different vehicles. At some point, I see a set of macros that you can just string together an entire acrobatic show.
I'm looking forward to your comments, and seeing what others come up with! Thanks!
John C.
With the recent increase in Public Awareness concering the safety of Drones and Robots DIY Drones members might want to take a look at the publishings of futurist Daniel H. Wilson:
Daniel H. Wilson is the author of the New York Times bestselling Robopocalypse and seven other books, including How to Survive a Robot Uprising and Amped. He earned a PhD in Robotics from Carnegie Mellon University, as well as Masters degrees in Artificial Intelligence and Robotics. He lives in Portland, Oregon.
Also, for those members who subscribe to Robot Magazine, there is a very interesting interview by Rebecca Hill with David Wilson in the May/June issue entitled "The Robot Man".
Kai Ryssdal with Marketplace went on site to meet with Chris Anderson at 3d Robotics to talk about drones. You can listen to the segment here.
So the question that Kai brings up that I think is worth talking about: How do we remove the stigma associated with drones? If your'e on this board, you think this technology is neat, you don't think about killing people. Au contraire, it appears most of the public has a fear of drones. How can we change this? Do we need a new name like Chris suggested?