I’ve been curious about what installation conditions I need to worry about when building my APM based quad. We are all very aware of how magnetic interference affects the compass but I was curious how different light sources, magnetic fields and heat affect all of the IMU sensors.
https://www.youtube.com/watch?v=MrEPsA34daY
I did some testing on my workbench. This is by no means an “experiment” as I was rather lackluster in controlling outside variables and I certainly didn’t run the test more than a few times. (Basically I ran each test once off camera just to make sure I wasn’t going to make a video of nothing.)
You will notice a distinct lack of accelerometer data in the videos. That is simply because I couldn’t seem to cause any interference to the accelerometers with light, magnetic fields or heat. I chose to ignore that portion of the IMU for my tests.
What I learned from this was that I need to put additional light blocking materials to the sides of my APM. I did some testing with the case on and light definately leaks in through the foam from the sides. I was surprised how much of a difference it made. I’ve experienced altitude loss during aggressive maneuvers with Alt Hold and I wouldn’t be surprised if this was contributing to the issue.
I also learned that heat affects the gyro. I’ve had a few roll over issues recently that have been diagnosed as a bad gyro. (I’m only 90% convinced that it’s a bad gyro. It will work perfectly for weeks and then just go nuts. Once it goes crazy it will only stay broken until the APM is power cycled.) I normally do my test flights outside of my home. This would involve cold power on in a 72 degree work room followed by a transition to a sunny 80+ outdoors. I’m going to do additional testing on this to see if I can reproduce my exact issue with heat only in controlled conditions.
Let me know if you have any other questions about my tests or if there is anything that I should investigate further during my next round of testing.
Also, some gratuitous FPV flight from my other quad.
https://www.youtube.com/watch?v=rxO0mrCKsLU
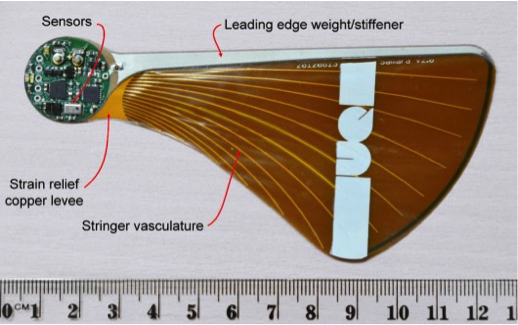 The second design from Dr. Pounds’ lab is named the Samara. It’s an odd looking UAV designed to mimic a maple seed. The Samara is built from a rigid circuit board with sensors housed on a tiny round PCB at its leading end.
The second design from Dr. Pounds’ lab is named the Samara. It’s an odd looking UAV designed to mimic a maple seed. The Samara is built from a rigid circuit board with sensors housed on a tiny round PCB at its leading end.