Found this on Boca Bearings monthly Innovation Competition.
Thanks Paul.
Found this on Boca Bearings monthly Innovation Competition.
Thanks Paul.

I have long admired the Australian UAS system and I might be getting this completely wrong.
A training scheme might get approved soon, and if you are planning on making some money with sUAS in Australia you might want to kick up a bit.
These bits made me smile
AVIO2004A Conduct frisk search of persons
AVIO2005A Conduct screening using Explosive
Trace Detection (ETD)
AVIO2006A Control access to and exit from an airside security zone or lands
Along with the need to
Requirement for emergency evacuation of aircraft is identified
There will be pots and pots of money to be made with UAS training around the world and bandwagons will be jumped on.
http://www.suasnews.com/2012/06/16329/australia-prepare-to-evacuate-your-unmanned-aircraft/
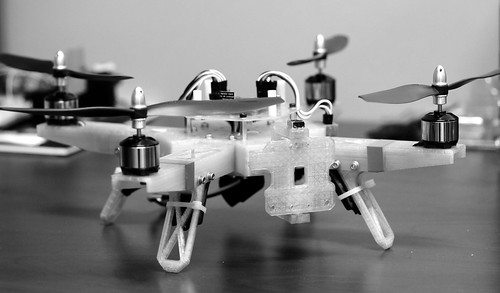
There is plenty of info on modding the 9x Radio to make it better, I dont intend to tell people how to do it, only how easy it is to make the changes and show some photo's of the things i have added/changed.
The easiest addon was the balancing thing for the neck strap, makes it nice and level, and so much easier to fly because you are moving the sticks instead of holding the remote!
The kick stand is great when at home programming or playing on the sim, saves the cables getting bent etc. It clamps onto the handle on the back, and doesnt get in the way at all (even when removing the screws to get inside)
The next picture was the first mod I made, the 6 Position switch. Not really needed and I wish I hadn't done it now, I would use the 3 pos switch and the 2 pos switch mix thing thats descibed very well in the forums. Having said that, it is an easy mod and works well, I cheated a bit and used 5x 1K resistors and just use a curve to get the right points in MP
With the original RX I had a few problems, very intermittant, and only when banking left... spot the tiny ball of solder that shorts 2 pins on the IC in the RX module, it actually rolls back and forward under there. It very briefly connects channel 3 and 4 which I think must screw up the APM and cause a sudden crash! Removing the ball fixed the problem
The standard transmitter and receiver are a bit of a let down, and I want the best of the best! So the FrSKY DJT combo was ordered along with the FrSKYLite thingy bob for RS232 voltage level shifting. I added the FrSKYLite inside the TX module and used 2 spare pins in the rear connector so there is no extra hloes needed in the case. also used the 5V and ground pins from the outside connector. There is also a 4K7 resistor on one line (under the heat shrink) I dont know what its for but it was in a circuit diagram I followed.
Dear Friends,
our lab continue to work and improve our platform , we are working on next generation RTF and OEM platform.
The new brand will be VR BRAIN 4.0 the revision of produvt will be MP32FX V4. Put a BRAIN in your DRONE :)
The new design will be based on experience doing with MP32FX V3 and NAVY 2012 . Same great sensor MPU6000 , HMC5883 , MS barometer and STM32F1 or F4 as micro controller and Data Flash onboard for save realtime data logging .
The design will be more compact , only all in one board with put a gps on it or connected by a cable
There are also interesting news about new exclusive ST MEMS sensor supported by VR Brain but will be more news available in the future :)
For special low consuption application will be available also L1 revision of micro.
So with this new board will be available also the new VR IDE PRO .
The main adavantages of this new ide is the direct support of .PDE file so will be more simple mantain the aligment of arducopter project and support of relative path so will be more simple de zip and use enviroment without need to redefine the path ecc ecc in the eclipse.
The last revision of firmware available is ACopter32 2.5.5 updated with last revision of Arducopter 2.5.5 and fully compatible with mission planner.
The firmware that use VRBRAIN is the result of Great Work of Arducopter Dev Team that continue to improve the main code add function and quality of flight . Work of FoxTeam that continue to develop great library for STM32FX hardware and implement same revision of class and library for this great ARM micro controller, and Beta testing group that check in fly the new revision of code. LaserLab Team that every day continue to improve Hardware , Firmware and Tools for develop great open and closed source project on Multipilot platform.
Thank guys for your hard work :)
This is the link of new VRIDE is 4 part download all then dezip it.
See last video doing with the hardware that will be used also in VR BRAIN
The precision of loiter is around 2 meter
Original Post here , detail and discussion here:
http://www.virtualrobotix.com/profiles/blogs/new-multipilot-for-rtf-or-oem-application-is-coming
here a thread of Getting Started with MP32F4 + NAVY 2012 precursor of VR BRAIN
New developer and user are welcome , this will be ideal platform also for oem developer : Autopilot and Gimbal Control systems :) The performance of VRBRAIN with ST F4 micro controller could be until 30x resource available respect at standard AVR micro controller (arduino)
Best
Roberto
Hi All
The Big Black X8 Wing is now in stock at FPVflying.com
Wing span : 2122mm
Wing area : 80dm2
Valid payload : 1000-2000g
Requires for flying :
Folderable prop 12 * 6 or 12 * 8;
2 * 20g servos(the size of servo hole on the plane is 40*40mm);
60A ESC or bigger;
4s 6000---10000mah lipo
More info: X8 Wing for UAV flying

Says that roadside cleaning workers found a abandoned hexa-copter near a penitentiary (in Presidente Venceslau, São Paulo state, Brazil), loaded with 3 cell phones with chargers and 3 saw blades (amateurs!). Probably was an attempt to deliver the cell phones to inmates (cell phones are very forbidden in Brazilian penitentiaries). Previous attempts involved pigeons with small backpacks, bows, arrows, and more.
No good news. I can already hear our precious politicians discoursing against hexacopters (and pigeons, and bows, and arrows,...).
Good news for those joining us at Sparkfun's Autonomous Vehicle Competition: if you're bringing your kids, they'll have something fun to do:
Sparkfun announcement:
At this year's competition, we will have an 8-by-8 foot maze, as well as a racetrack, where you can compete and play with robots. You can build with LEGO, VEX, Arduino, BASIC STAMP, PIC, Gears ... whatever you want! Bring your robot to AVC and we'll help you run the courses.
Kids will run their races between the adult heats, and each kid will have three runs (time permitting, we hope to also get a few practice runs in). If the maze is a bit challenging, we will weigh it against the plain speed track to form the judging rubric.
A couple of technical points:
- Your robot should be less than 8 inches wide to fit through the maze.
- The course walls will be approximately 3 inches tall, and painted white for calibration.
- You can run any platform you bring, as long as it does not harm the other robot. Good sportsmanship please!
- We will break out three age groups -- 8 and under, 8-12, and 12 and up -- but we may run you all together.
What if you don't have a robot? Don't despair! We will be providing a limited number of ProtoSnap MiniBots and computers, so kids can play with them and get to run a bot even if they don't have one of their own. There will be SparkFun volunteers to help get everyone straightened out on programming the MiniBot. Unfortunately, we won't be able to help with programming other platforms.
We are scheduling this event on the AVC EventBrite sign up, so if you want a good seat, please register as soon as possible, and let us know how many kids you'll be bringing. If your entrant(s) will need access to a robot, please email us at education@sparkfun.com; that way we can do our best to make sure we are prepared and no one is disappointed. If you are using one of our robots, we may schedule you around the demand for MiniBot.
In case you've missed the news today:
The return to Earth completes a historic first mission to the International Space Station (ISS) by a privately operated vehicle.
Impact with the water was confirmed at 08:42 Pacific Daylight Time (15:42 GMT; 16:42 BST).
Fast boats positioned in the splashdown zone were despatched to recover the unmanned capsule.
Early data suggested Dragon came down very close to its targeted location about 900km (560 miles) from the Baja Peninsula.
http://www.bbc.co.uk/news/science-environment-18273811
SpaceX re-entry:
As you might have heard, a few days ago a strong earthquake hit the North of Italy, destroyed lots of industrial buildings and caused several deaths. On an Italian news portal there is a video of a RC quad (cannot recognize the model, but maybe someone else can) used to survey collapsed buildings, trying to spot survivors and assess damage.
Unfortunately the embed code from the news site doesn't work here, so if you want to see the video you have to go to the site (from second 42 to 57): http://video.repubblica.it/dossier/terremoto-emilia-20-maggio/il-capannone-a-san-giacomo-roncole-macerie-e-droni-in-azione/96803
A few details here (love the RADAR mount!).
(Via Robot Dreams)
In the five years that we've been running this site, the Moderators have banned thousands of spammers, but only three or four members for violations of our Terms of Service, which make clear that civil discourse is paramount and personal attacks will not be tolerated.
This is not something we do lightly. It happens only after repeated violations and warnings, and we do it with a heavy heart and for the good of the greater community, who deserve a place for civil discourse and mutual support. We also try to be as transparent as possible about the process when it has to happen.
I'm sorry to report that we have come to the point of having to do this again. We have suspended Kevin Finisterre for repeated violations of our TOS, including multiple personal attacks and the publication (via Twitter) of the contents of a private message communication with another member, which is a gross violation of that member's trust. This is the final straw in a long track record of abusive behavior to other members here, and he has been warned several times that he was at risk of banning for this. He has hurt many people here and otherwise made this a less happy place. That's bad for everyone.
This is a shame, because despite Kevin's mistreatment of other people, he made some good points and otherwise could have been a valuable contributor to the community. That's why I want to make it clear that we are not deleting any of his content, which will remain on the site, despite its tone and violations of our TOS. Also note that it is a suspension, not outright banning. I hope we can find some agreement with Kevin that will bring him back on more civil terms.
I must also report that he has threatened to create aliases and attempt to cause chaos here if he is banned, so if this happens the Moderators will attempt to be as vigilant in tamping this down as possible. But we would appreciate the community's help us in spotting and helping stop any behavior that seeks to undermine the civil and mutually supportive atmosphere that we have tried so hard to maintain here.
Thank you for your understanding and help in preserving DIY Drones as a friendly place for civil discourse and sharing. And my special thanks to the 50+ Moderators, who work so hard every day to help maintain a high signal-to-noise ratio here. If you'd like to join them and have a track record here, please PM me. We'd love to have you join us!
--Chris
The Turnigy H.A.L Frame looks to be quite nice....Not sure what Heavy means, but this this is made of aluminum, and at 614grams, is not too heavy, provided the right motors and props are used....I think I will go ahead and order one, and try it out...
Anyway, more information over at HobbyKing:
ST extends it's gyro line with a new 9 axes IC - LSM333D.
Features:
1. 3 axes gyroscope with ±250 to ±2000dps selectable rotational acceleration full-scale range;
2. 3 axes accelerometer with ±2g to ±16g selectable linear acceleration full-scale range;
3. 3 axes compass with ±2 to ±12gauss selectable magnetic full-scale range;
4. LSM333D includes a built-in temperature sensor and smart power management for longer handset battery life;
5. The module allows the choice of either I2C or SPI connection to the main system controller.
6. The LSM333D is available in a 3.5 x 6 x 1mm package, and will soon enter volume production in the 4 x 4 x 1mm package.
Here's the datasheet of the LSM333D in a 3.5x6x1mm. package - http://www.st.com/internet/com/TECHNICAL_RESOURCES/TECHNICAL_LITERATURE/DATASHEET/DM00050102.pdf
Waiting impatiently for the first samples for testing.
Best regards
Nick
Hello Everyone, we all know our GPS board (the one that comes with the APM1) has no battery to backup data.

This has the disadvantage to make the GPS not very precise in the first minutes after power up and that every startup is a cold startup (at least one minute to get a 3D fix).
This is because the GPS needs find the satellites without a previous almanac (that is information on position of the satellites visible in that location at a specific time).
As you understand almanac is VERY important. Also considrer that the almanac is sent by every satellite and requires 12.5 minutes to transmit (or so).
From Wikipedia:
"Finally, the almanac allows a single-frequency receiver to correct for ionospheric error by using a global ionospheric model. The corrections are not as accurate as augmentation systems like WAAS or dual-frequency receivers. However, it is often better than no correction, since ionospheric error is the largest error source for a single-frequency GPS receiver. Each satellite transmits not only its own ephemeris, but transmits an almanac for all satellites"
Of course this is not sufficient to have a perfect position: sky visibility, surrounding objects and number of satellites are the key factors.
This is why after a FIX (fixed blue led) number of satellites is very low (5 to 8) and this get higher (10 or 12) after some time of flying.
So, because of this, I decided to bring up an old hack made by Dcaspi, an old friend who worked also on the former Ardurpirates code.
The hack requires some soldering skills, so I suggest you to do it only if you are confident with it.
Beware if you fry the board or GPS unit, I cannot (nor Dcaspi) be responsible for it...
This mod works and has been used for a while.
This is the original location:
Have fun!
Emile
If you use the DIYDrones MediaTek? GPS, you're probably aware of the fact that, on each activation, it make take a very long time to get proper satellite lock. The reason is that it always starts from scratch; it is not aware of it approximate geographic location, not of the time.
The reason for this is lack of backup battery. Data is completely erased once you disconnect the main battery.
The GPS module itself has a backup battery input. Here we show how to connect an external battery to that input.
You will need a a battery holder and a small, 3V, coin-shaped lithium battery. These can be purchased at any DIY electronics store.
I also used a piece of perforated prototyping board, but this is for convenience and not a must.
Below, you can see the GPS module board layout. Cut one trace as shown, and connect the two leads from the battery holder to the marked places.

Here is how the setup looks:

This is how it looks from below. Note the place where the trace is cut:

[Sorry had to change some inlined images to link. Too big]
This is very good for Home Automation. I was just thinking if this can be anything useful for our UAV Automation....
Any Suggestions or comments ?
New research by the NIMBUS lab at the University of Nebraska-Lincoln has demonstrated how a UAV could hover over electronics on the ground and charge them. This might be useful for distributed sensor networks that can't use solar energy to recharge batteries.
From IEEE Spectrum:
The type of wireless power that these quadrotors are beaming out is based on what's called "strongly coupled magnetic resonances." Basically, you've got two coils of wire: one on the quadrotor, and one on whatever you want to power or charge (we'll call this the receiver). The quadrotor drives a current in its coil, which generates an oscillating magnetic field. When the quadrotor gets close enough to the receiver, the receiver's coil starts to resonate with the magnetic field transmitted by the quadrotor. That resonance induces a voltage in the coil, which the receiver can use to power its electronics or charge its battery.
As far as applications go, the researchers suggest that this kind of system would be great for "highway messaging systems, ecological sensors located in forests, or sensors shallowly embedded underground or in concrete." UAVs would act as mobile power stations, zipping around and delivering power to sensors when necessary.
Hi all,
We have been selling our AeroMapper UAV as a kit so far, and we are glad to announce our new Ready To Fly version is available now. Basically this is our second option which includes installed servos, motor and ESC, batteries, RC transmitter, and even battery charger.
We have our first batch in stock. Please note that availability status change very fast for now, as this is on a first come first serve basis. Anyway within the next month our plan is to keep units in stock always ready to ship!
We are very excited to announce also that our third option will be available pretty soon, which will include ArduPilot Mega 2,0 installed and basically ready to fly! This make the AeroMapper UAV a very hard to beat combination for a high-end fully-composites UAV for remote sensing and photomapping. This option (Option C on our website) will be priced at less than $4K !! (Including electronics, batteries, RC Transmitter, chargers, etc., camera and autopilot).
Also, in about two months our parachute recovery module will be available and can be easily installed in any of the AeroMapper UAV options, which share the same airframe.
Features:
A cool feature on our design is that all the parts are completely modular. For example, if you need to repair or change the fuselage, just easily detach the Payload Bay Module which contains almost all the electronics. This way you don’t have to uninstall or reinstall things like the autopilot, camera, ESC…. Just add the motor, elevator and rudder servos to the new fuselage, reattach the Payload Bay Module and you are back into the air in no time. This is especially helpful when you are in the field mapping or doing jobs and when time is key. Spare parts always available in stock, at very reasonable prices.
Additional features:
- 2 piece wing for easy transport.
- Full composites (carbon fiber and fiberglass).
- Very durable and strong.
- Totally modular
- 1 hr of flight endurance with the set of batteries included (Options B and C).
- Hand-launch
- Payload bay module has a servo activated cover to protect camera lens and electronics during landing.
- Excellent wind penetration and wide range of speeds.
- Full flaps for low speed landings.
For more information and orders: http://www.aeromao.com/the_aeromapper_uav
Videos coming soon....!!
Anna
It has been a long time since I have posted, however things haven’t stopped in the autonomous sailing group. We have built and tested a quiet stable RC Trimaran, the head-designer of the boat is Rob. I have included the sketchup file here: Trimaran_AutonomousSailing.skp. And you can visit: http://sailingdrone.wikispaces.com/PVC+Trimaran for a bit more details (I warn you its messy).
Sailing with it was surprisingly successful. The Trimaran: Anna, was stable enough to carry a GO-pro and deliver pretty nice images. In the movie you see some of the footage. We also tested some other prototypes, however Anna is by far the most interesting one. It is very modular and highly mobile, it weights only 10 kilos.
Our plans are to use the APM and Ardupilot to achieve autonomousity. And it is becoming more and more realizable; especially since Rik Bootsman has come up with a way to make a cheap wind sensor, see picture. You can read more about this sensor here: http://rikbootsman.com/
Right now we are looking for anybody who can help us with the software and the integration of APM and Ardupilot. So if your interested, send me message and/or join the group.
Your feedback is more than welcome. And if you want to rebuild your the trimaran and you need help or have questions, please send me a message.
Cheers,
Sina
Platform for Ardupilot
Windsensor (couldn't turn the picture 90 degrees)
Disassembled Trimaran
Servo Platform
I've been thinking include OpticalFlow whit laser sensor point.
all came into my mind after seeing this post.
I've been thinking include OpticalFlow whit laser sensor point.
all came into my mind after seeing this post. or I I think it would very accurate. What do you think?.
but as this in the arducopter?
http://ashishrd.blogspot.com/2006/11/obstacle-detector-using-webcam-and.html
Hi everyone! I’m back with another webcam project, as usual. :) I’ve been having a lot of fun making cool things using my webcam over the last couple of months. This time, I’ve created an obstacle detector which uses a cheap laser pointer and a webcam to determine how far an object is from the camera. I worked with my cousins, Anuj Karpatne and Prateek Raj on this project.
On 5/20/12 North Texas Near Space (NTNS) and Project Soar collaborated on a dual launch during the annular eclipse. Albuquerque was directly in path of the eclipse. The NTNS payload had most of the electronics that I had intended for a guided flight. That airframe is no more, but I have some data that I'd like to share with the group as a result. The dual launch was a great target of opportunity for looking at APM data at altitude. Most of the flight objectives were met.
KML:
NTNS-1 at Altitude.
Project Soar Payload at Altitude:
The NTNS-1 payload captured the Soar payload during descent. I don't know if this has been done before.
I'm glossing over the APM data because most of the setup, objectives, data plots, lessons learned, future activity are documented below. The APM data was converted to CSV so that it's fairly easy to read. I really brute forced this and should have written a script. SW V2.28 was somewhat modified to reduce the data frequency to a constant 0.5 Hz. It turned out that the flight time from turn on to recovery was just under 3 hours and produced only an 805 kb log file. Obviously I needed to gather more variables or choose a higher rate. I was lucky enough to be able to walk up to the payload and turn it off. APM operated through the landing. There is another thread that we did pre-launch discussing tailoring of the data stream. Unfortunately I didn't get to far mainly due to time. I was done with SW the day before the launch.
Postflight Data and Reconstructions: Postflight
Data Spreadsheet and Plots: Analysis Spreadsheet
Log Files and other data: TM
Preliminary Video Rendering: Best in 1080p setting
If you poke around in the site you can find 1920X1080 frame captures for most events.
We're getting collectively closer to making some guided flights. Now we have 2 data sets. Best of luck to all.
Regards,
Larry D. Grater
{kind=link}