
I made this simple script to control a MultiWii copter with a joystick and a PC over XBee (or some other serial transceiver pair). Please try it out and let me know of any issues.
I made this simple script to control a MultiWii copter with a joystick and a PC over XBee (or some other serial transceiver pair). Please try it out and let me know of any issues.
From Smithsonian Magazine:
Water management researchers have been experimenting with unmanned drones that can fly over an orchard and record heat levels across vast swathes of land using aerial imagery. Thermal infrared cameras take thousands of images at regular intervals on a voyage across hundreds of acres. Computer software stitches the images together to create a super high-res image, in which each pixel can be read for temperature—cooler areas show up in cool tones, while warmer areas appear orange, red and yellow. In the aerial image here, powerlines, asphalt roads, metal towers cut across the picture in yellow. The scientists were experimenting with different levels of irrigation, which are visible in the patterns of blue and red across the tree canopy.
A thermal infrared image of orchard water levels
BTW, that's a very expensive-looking UAV called the mX-SIGHT from Autopilot Services and Systems in Germany.
Lots more in the original Smithsonian article here.
[Via The Verge]
Idaho Falls with the Cinestar 6 and GH2 from GravityShots.com on Vimeo.
Over the water with a hexa and GH2 while on the last leg of a road trip:
Cheers,
Jeff
I think that we need to restart the blog on this.
This guy built a 40 mm ball turret that would work great in small UAS's. He said that he would not sell it but i think having him post details of how he built would be nice.
Here is a video of tit working.
If anyone has other turret systems to share of Pan and tilt systems please post... I am looking for a good design to integrate into my UAS...
Hi Guys, could not help it but had to post it
https://www.youtube.com/watch?v=eA4U-6GmkUw
Although it could be more stable it still brought a smile to my face
GReets
Steven
 Having had my curiosity peaked by a recent DIY Drones post, I decided I would go ahead and purchase the Turnigy Integrated PCB Micro-Quad from HobbyKing, along with all the accessories necessary to complete the unit. As seems to be quite often the case with HK, when I finally put in the order, the Turnigy motors were backordered, as were the motor mounting bolts and nuts. I decided to order what parts were available, and seek to source the deficiencies elsewhere. Shipping for two kits (my nephew and I are each going to build one) was $29 CAD, which seems a little steep, in my opinion.
Having had my curiosity peaked by a recent DIY Drones post, I decided I would go ahead and purchase the Turnigy Integrated PCB Micro-Quad from HobbyKing, along with all the accessories necessary to complete the unit. As seems to be quite often the case with HK, when I finally put in the order, the Turnigy motors were backordered, as were the motor mounting bolts and nuts. I decided to order what parts were available, and seek to source the deficiencies elsewhere. Shipping for two kits (my nephew and I are each going to build one) was $29 CAD, which seems a little steep, in my opinion.
I found a supplier for what appears to be a compatible motor (Suppo A1504) and I exchanged emails with Garret at Altitude Hobbies. I have put my name on the four he had in stock, and asked him to hold another four when it gets them in. If others are considering building the Micro-Quad, you might consider getting in touch with Garret regarding the Suppos if you don't want to wait for HK to get their Turnigy units in.
The objective of this build is to get a little practical experience with a multi-rotor with a modest investment. Undoubtedly, the initial payload will include the HK HD Wing Camera, which is the same one used in the Yachats video posted a while back. For the price and weight, you just can't beat the quality of video it produces.
As is customary and traditional, we celebrate every new 1,000 members here and share the traffic stats. This time it's 23,000!
There were more than 1.41 million page views this month, which is a record. It just took us four weeks to get this latest 1,000 members--we're averaging about one new member every 43 minutes.
Thanks as always to all the community members who make this growth possible, and especially the moderators who approve membership applications and blog posts and otherwise answer questions and keep things ticking here. We've got about 50 moderators now, but if anyone would like to join this group, please PM me. If you've been here for a while and have been participating, you'll fit in great.

What a journey the past nine months have been. At university, a classmate built an Arduino-based quadcopter for our senior capstone design project, but I was already committed to a 4WD Mars-type rover robot project. I was toying around with some RC helicopters, but I had my eye on the quad...
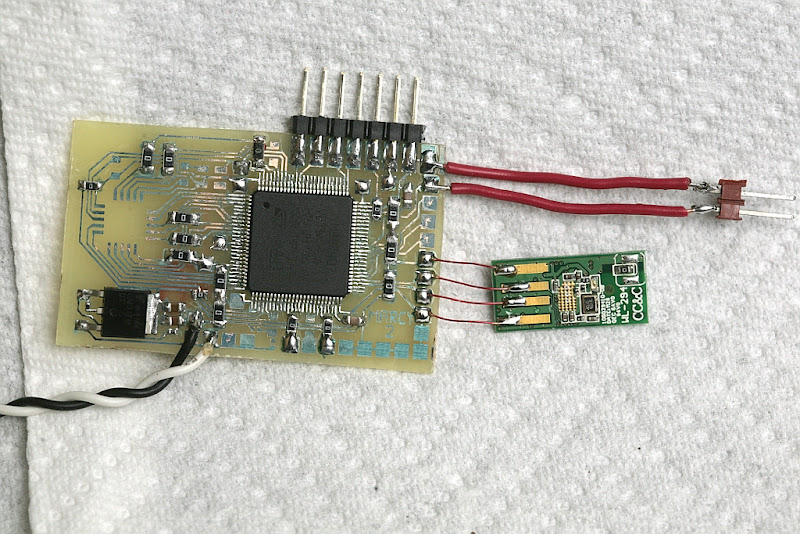
Moved to Canada after graduation and went to work specifying a quad frame, motors, ESCs and such. So much has happened in the quad industry in the past 9-12 months. Coming from a control systems background, I wanted to test my skills and decided to take on my own controller, but I was going to use an AHRS unit with built-in extended Kalman filtering to help reduce my processing time, and simplify things. While researching the frame, it was noted that one could use eight (8) motors--two on each arm--for redundancy and with a future interest in FPV I thought that redundancy was exactly where my design needed to be. Since I was driven to create my own design that would meet all my goals, I thought I'd better have built-incontrollerredundancy, so that I could protect my expensive frame, and electronics from something going wrong with my pre-alpha control system.
Here's the first version that never was completed:
The radio fed into the PIC32MX MCU and was output, raw or filtered, to the redundant FY-90Q controller. Outputs for the ESCs were multiplexed by a 4-port A/B servo multiplexer from Pololu. The goal was to have a watchdog on the PIC32 that controlled the switching of the two flight controllers, and the FY-90Q would hopefully recover my quad if something went wrong with my green code. The AHRS was a CHR-UM6 unit from CH Robotics--a splendid little device tucked away under the PIC32 board.
With a strong interest in a flying robotics platform, I wanted to have scripting capabilities and even entertained the idea of using FPV and machine vision, but like I said above A LOT has happened to the industry in a short period of time and I learned of the ArduPilotMega V2 (purple) that already had a ground control station and made use of the MPU-6000 from Invensense for sensor fusion. I had done quite a bit of work with AVR microcontrollers at university and knew that my classmates used an Arduino Mega board for their quadcopter. I also knew it was quite taxed when trying to perform the sensor fusion for a 6-DOF IMU, so the thought of adding a barometric altimeter, compass, GPS, and who knows what else left me feeling cold from a performance standpoint. The addition of the MPU-6000 to the APM2 board, with future sensor fusion handled by this IMU really appealed to me and I thought I could get everything I hoped to get with my first large and clunky design all wrapped up in a small package that (1) was already developed and tested, (2) integrated more sensors and options, (3) had a ground control station already written, and (4) looked cool and took up less space/weight.
My final unit is shown in the photo below. I built a test stand to help dial in the PID parameters for the pitch and roll axes and I've had my first few successful flights in between wind and rain storms here on the island.
 I retained the servo multiplexer to use its jumper to select between Master output and Zero output. This lets me power up the quadcopter with the LiPo battery attached (and the jumper removed) without fear of the ESCs spinning up. I can setup the radio and parameters as needed, then install the jumper to arm the ESCs and be ready to fly.
I retained the servo multiplexer to use its jumper to select between Master output and Zero output. This lets me power up the quadcopter with the LiPo battery attached (and the jumper removed) without fear of the ESCs spinning up. I can setup the radio and parameters as needed, then install the jumper to arm the ESCs and be ready to fly.
Right now, I'm using Bluetooth for local wireless telemetry to setup the gain constants, but will replace that with Xbee in the next week when my shipment comes in.
I went through an intermediate quadcopter stage where I used an OpenPilot CopterControl board (while waiting for the APM2 board) and had to replace the Hacker ESCs shown in the first photo with these Maytech ESCs because the CC board had their gains specified for a 400 Hz ESC update and the Hacker ESCs wouldn't arm above 100 Hz update rate.
The components on this quad are:
ThunderPower 4S G6 3300 mAh battery
Hoverthings VC550 frame
AXI 2217/20 motors with RMS mounts
Maytech 30 ESCs
9" x 4.7 props--currently loaded with GemFan but prefer APC (not as brittle)
A7 Engineering Bluetooth module
Pololu 5V/3.3V SBEC
Pololu 4-channel servo multiplexer
ArduPilot Mega V2.0 (purple)
12V SBEC from HobbyKing to power LED strips
Turnigy waterproof LED strips: North = blue, East = green, South = yellow, West = red. White are supposed to go on the skids but I haven't hooked them up.
So, there we go. My professors always knew I was going to build a quad, and as much as I wanted to design my own controller from an academic perspective, I just couldn't beat how neat, tidy, cool, and otherwise perfect the APM2 device is. It completely meets my needs from all of my initial design goals and better yet I don't have to reinvent any wheels. Now, I get to go out and fly.
I'll save the machine vision for my rover robot and am looking at MAVlink and qGroundControl for possibilities for a rover drone...
For the past 4 months I have been designing and developing a UAS system mainly for entertainment purposes but the future could hold potential business opportunities. My research has led me to several potential paths and products to experiment with in order to accomplish my goal.
Goal: To build a semi-professional grade UAS and ground station capable of long range flight, camera/payload stabilization, autonomous flight (takeoff->landing), waypoint navigation, stabilized flight, real-time telemetry feedback and video, being controlled by joystick/throttle, and long endurance; all being under a DIY budget.
I have chosen several products to meet these requirements and I will give a detailed description of both my airframe and ground station plans and will accept any comments/suggestions from more experienced persons.
To start off, I will give you a little background on me. I am a newly separated Special Operations veteran with UAV experience (RQ-11B, Scan Eagle). I have a great deal of computer knowledge but could use a refresher on programming. I have an outstanding command of RF propagation and theory.
Airframe: Skywalker 1.9m wingspan version. I chose this for its durability, modification ability, low-cost, payload weight, and great reviews. The aircraft will be coated with Styroplast, primed and painted, and equipped with landing gear. Servo doors/covers will be installed. High quality linkage will be used.
Motor: Scorpion SII-3014-1040
ESC: Scorpion V3 60A
Prop: APC 9x7.5E
Battery: 4S 8000mAh LiPo
Servos: 6x HS-65MG (2x ailerons, 1x rudder, 1x elevator, 2x flaps)
Primary R/C Control: Joystick control interfaced with ArduPlane over 900MHz
Secondary R/C Control: Dragon Link LRS 435MHz with JR 7-Channel Radio
Video Link: Lawmate 2.4GHz 1W Tx; ImmersionRC Duo2400v2 diversity Rx
Video Antennas: 1x 2.4GHz 18dBi Yagi; 1x 5dBi Omni; 1x 3dBi Omni (Tx)
Cameras: 690TVL U-WDR Pixim Seawolf CCD for Pilot Cam; GoPro Hero 2 HD for Aerial Video/Surveillance
The Pilot cam will be mounted in the tip of the nose; The GoPro will be mounted on a custom P/T under the fuselage.
Autopilot: APM 2.0 + Digi Xtend 900MHz
Xtend Antennas: 1x 14dBi Patch; 1x 3dBi Omni
OSD: MinimOSD
Electronics Battery: 3S 2200mAh w/ UBEC
Ground Control Station: Will be embedded in case with professional aluminum panel mounting, switches, and wiring.
Case: Pelican 1650
Monitors: 2x 12.1" LCD
Joystick: DIY with CH industrial joysticks and POT to USB board
GCS Battery: 12v 20Ah Lead Acid
Antenna Tracking: ArduStation II GCS
This is a project I am currently working alone, so if anyone is in the Valdosta, GA area and is interested in partnering, please let me know.
I apologize for not having more photos, but as I start my build I will be posting many videos and photos!
Happy Flying!
Manely conrolling a USB device from a microcontroller, something we hated when it was our day job, but now suddenly need.
Also in this issue, home made JTAG is now flashing 3.7kbytes/sec. The latency is so bad when changing data direction in a USB device, bitbanging the reads in the JTAG protocol is killing us.
Got the ARM up to 168Mhz. Pretty fast for a home made board & it won't need a crystal to drive the camera. The GPIOs go to 15Mhz even in software bitbanging.
Because we don't have an external oscillator & the example firmware was written for the Discovery board, which has an external oscillator, it took quite a bit of fussing. The examples have no settings for the internal oscillator.
Should be noted the STM32 can be bricked if the PLL is misconfigured for over 168Mhz. JTAG will start timing out in the halt requests & you'll never be able to reflash it.

Fortunately, we have some oscillator chips for the camera to drive the ARM at a lower frequency & get it reflashed. It automatically switches to an external oscillator if one exists. Those are real tiny oscillators.
Next on our list was the reality of not having a C library. It's a shame to run such a powerful chip with no C library or math library, but getting those to work requires a lot of trickery & we don't need them yet.
The C library does a neat thing during initialization: copy the compile time initialized data tables to SRAM. Since we don't have enough SRAM to store data tables, it was easier to just hack around it.
Do nm arm/copter.elf|sort|less
find everything starting in a d in the source code & change it from static __I to const to get the compiler to store it in flash.
The serial port printf stream has begun.
Welcome to Marcy 2
HCLK_Frequency=168000000 PCLK2_Frequency=84000000 PCLK1_Frequency=42000000 SYSCLK_Frequency=168000000
The claim of high speed USB on the product matrixes was wishful thinking. In reality, the high speed mode requires an external PHY.
There are 2 USB cores. It could theoretically be 2 USB hosts, simultaneously. 1 core does full speed & low speed. The other core does high speed & full speed, but getting the high speed requires an external PHY.
They're bonded to different pins. The core that does only full speed uses the OTG_FS_DM, OTG_FS_DP pins in the datasheet. The core that does high speed uses the OTG_HS_DM, OTG_HS_DP pins, but since it requires an external PHY to do high speed, those pins can never actually be HS. They're really full speed, using the core capable of high speed.
Since the Discovery board only uses the FS pins, many #defines & switches have to be hacked in the source code to use the HS pins in full speed mode. Some of them are labelled FS, some are HS, & some are HS_FS. Then you need to rename the interrupt handler HS instead of FS, everywhere.
The great debate is whether to port the minimum required sections of the rtl8188 driver to Marcy 2 or create a fake kernel layer to interface the stock driver. Either solution is bad. 1 way involves porting every new driver that's ever going to be made. 1 way involves emulating a huge amount of software which changes in every kernel release.
This is what I've done to my Dagu Rover 5!
As it comes out of the box.
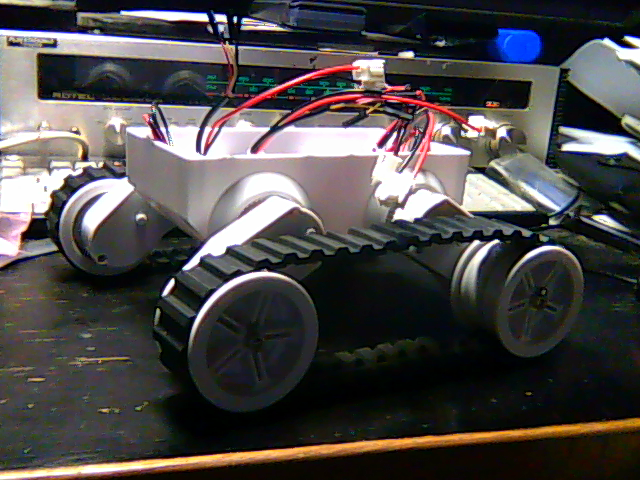 I was shipped the 4 motor version.
I was shipped the 4 motor version.
I live out here in the "boonies", so I get to talk to guys that use and maintain earth moving equipment.
There is even a guy that restores old tractors, stationary engines and such.
Talking with them was great, they all said powering a track at BOTH ends was a total waste of time and power.
Most people who get one of these say the tracks are a pain.
The 'dozer mechanic, who is ex-army and worked on tanks, told me that I could expect the thing to "throw" tracks due to
- no road wheels
- being powered at both ends of the track
So I went with the Dagu Wild Thumper wheels, 120mm in diameter.
Straight up it draws less current, that might be due to more mechanical advantage of a larger diameter wheel.
One thing that I don't get is most guys just wedge an Arduino etc and a few batteries in the chassis and call it "done".
Well that's just not good enough!!
I want mine to be a lot more robust.
The other thing is if you have off road wheels, the damn thing should be able to cope with dirt, dust and a bit of water!
So I set about building some chassis mods.





The Controller is a genuine Arduino Mega, with Sparkfun XBee, GPS and Monster Motor Shields.
I have a DFRobot prototyping shield with an LSM303 tilt compensated compass sitting on top of the stack.
The XBee is a Series 1, 60mW XBee Pro with the U.FL to RPSMA conector.
My controller is either another genuine Mega with Sparkfun GPS and Joystick shield or you can use an XBee USB Explorer on a computer.
The steering either way looks like a numeric keypad for steering, with "z","x","c","v" setting the throttle level.
My video link is a digital 2.4Ghz security camera, which has a low-ish frame rate, but plays nice with the 2.4Ghz Xbee.
I have a pair of 900Mhz XBee Pro's for when I go to an analogue video link.
Here is some video showing the onboard equipment and some "on patrol" video.
https://www.youtube.com/watch?v=43zqBtQyBF0
I just got this video from André Kjellstrup.
It shows the importance of an OSD with instruments in hard FPV flight conditions.
From his own words: "lost visual far out over water when a sudden and passing snow shower with wet, heavy snow clogged lens". Fortunately his craft was equiped with ArduPilot Mega and MinimOSD. ;)
Here is an earlier video from André who is always giving us his feedback.
Thank's by your nice videos André!
The Nova is grounded while I figure out the APM troubles I'm having, see these posts for the details:
http://www.diydrones.com/profiles/blogs/auto-land-testing-and-a-sad-apm?xg_source=activity
In the meantime, I'd like to announce the Raptor! It's going to be a 48 inch wing span flying wing designed after the very successful Ritewing Zephyr. If it performs well it will get an APM as well and be tested alongside the other airframes for efficiency/flight resilience.
Should be a great entry into flying wings and help me consider it as an option for my USA trip airframe. I'll build it, maybe maiden it next week!
-Trent
The Epson Movereo BT-100 is an Android-powered transparent video goggle, with interesting hacking potential. This 16-year old kid decided to show what they can do by flying an AR.Drone in FPV mode.
From Engaget
These shades have dual transparent lenses with 960 × 540 qHD resolution bringing you video in three dee, while audio is doled out by built-in earbuds with Dolby Mobile technology. Content is accessed via a Froyo-powered control unit equipped with 802.11b/g/n WiFi and 1GB of internal memory, plus there's an SD card slot (4GB card included) for storing media. Navigation and control comes courtesy of the controller's touch-sensitive trackpad and dedicated Android buttons, a 2D/3D toggle switch, and d-pad. The BT-100 will be available in Japan come November 25th for ¥59,980 ($771 US), but those interested in importing one can get all the device's juicy details at the Source links below.
The Verge explains the hack:
16-year old hacker and programmer Thomas Sohmers is working on a project that lets you control a Parrot AR Drone quadrocopterusing the head-mounted display and its handheld controller. Sohmers' app connects to the Parrot through Wi-Fi, letting you both control its movement and see through its cameras. This means that you can look through the drone's front-facing camera while flying, and then the bottom-facing one while landing, while still being able to view the copter itself. There's still some work to do on the controls — right now you can only control the rotation and vertical movement — but cool applications like this at least provide an extra excuse to don the bulky BT-100.
Really cool and instructable movie about connective robots. it's Friday guys !!!!!!
As part of an ongoing "effort to safely and efficiently integrate UAS into the NAS [national airspace system]," the FAA is working to develop six test sites for autonomous aerial systems, and would like input from the public: http://www.faa.gov/about/initiatives/uas/. It appears they are taking suggestions on all aspects of site requirements, making this a very exciting opportunity for this community. See the following link for more information, and for directions on how to submit comments: http://www.ofr.gov/OFRUpload/OFRData/2012-05735_PI.pdf.
Here is a cool project i've found on the net... it can walk and fly :)
This one was one of my favorite places to fly in the USA. Lake Powell really is amazing, the people there are friendly and welcoming, and the scenery is out of this world.
Motor 12mm Tube mount in stainless steel!
What do you guys think?
what parts would you like me to add?
Thanks for all the interest and support so far. I should have the site up and running in the next week! Still trying to figure out the most cost effective hosting solution. :) I'll definitely contact everyone who has contacted me with interest in beta testing when it is ready. I took a few days off from coding to try and get my 3DR quad flying. It was almost a success until a tethered flight in the garage went bad! Lost a motor and some props, waiting on parts now. :)
Progress on each workflow/UAV:
Pteryx UAV - 9/10 completed. (.csvp)
MAVinci UAV - 9/10 completed. (.csvm)
ArduCopter - 7/10 completed. (.log) accuracy isn't the best / (.gpx file is lacking compass/heading info)
(blended mosaic has trouble from forest coverage, fewer auto detected control points. it does better once resolution is turned up)
MAVinci Sample Imagery Processed! :D Very big thanks to the MAVinci team and the support they have given me! It has been very helpful in improving the MAVinci support and making some nice maps. They have a couple of really nice sample imagery sets at the following link: ftp.mavinci.de
The processing will work with GPS EXIF enabled images or not. I don't have access to non-GPS enabled images and the associated flight logs so I haven't coded this fully yet. It supports Canon and Panasonic camera's at this point, as this is all the sample imagery I could get a hold of. I can certainly add the code once I get additional camera and imagery formats. So keep an eye out for that..
Issues/Problems:
* blended mosaic isn't georeferenced
* control point detection isn't the best in forest, desert type areas
* ie css/browser issues
* unfinished non-gps enabled imagery workflow
* a bunch of others
I also added a interface to open source bundler, which will create 3D point clouds from the images. Once completed you can download the ply/pointcloud bundle as a zip file and do as you wish. Most of the following workflow: http://diydrones.com/forum/topics/making-digital-elevations?xg_source=activity Thanks Mark!