The annual Australian UAV competition starts next Monday, Sept 27th. Ten teams are entered. The schedule of events is now up. Wish we could be there!
All Posts (14056)
Sort by
It's a great way to get into the APM development team process, and shouldn't take much work. Please respond in the comments or PM me if you're interested.
There is a simple control technique to get good altitude control during autonomous landings. Turn off the throttle and follow a glide path defined by 2 waypoints. The first point is the approach point, and should be about 10 meters above the beginning of the runway. The second point defines the glide path, and should have a negative height, and be unreachable.
Whenever the plane is above the desired landing glide path, the pitch altitude control should be programmed to engage. Whenever the plane is below the desired glide path, altitude control should simply maintain level pitch, that will keep the unpowered plane from stalling.
If the plane is landing against the wind, it will land close to the first waypoint. If it is landing with the wind, it will land where the glide path intersects the ground.
The above pair of tracks were recorded during 8 autonomous flights of an EasyStar that I made today. Waypoint7 is the approach point, and waypoint8 defines the glide path. The two landings were within 7 meters of each other, and close to the intended landing point.
Best regards,
Bill Premerlani
A hydrogen fuel cell hybrid power-train for 1/10 scale model hobby RC. The H-Cell 2.0 can be connected to almost any RC platform and will provide continuous power to recharge the on-board batteries. Using this hybrid system it is possible to increase the run time of RC vehicles by more than four times!
When the solar panel option is included the HydroFILL and H-Cell 2.0 become a 100% renewable energy system. The solar panel also has the added benefit of making the HydroFILL mobile and HydroSTIKs can be refilled anywhere the sun shines!
Here is the PDF brochure they sent me: H-Cell 2 0 Brochure.pdf
Hello everyone,
in this video you can see the first pre-flight testing on the new HG3.2 the airplane has the following features:
Created by Joseph D'Angelo
Hardware and firmware development: Roberto Navoni
Electronic Edge: Ardubotix 1.0A (Multipilot)
Wheelbase: 1.65 m
Maximum dimensions: 2.60 x 2.60 m
V2 Version: hybrid
Electric Motor: Hacker A60
Petrol Engine: Zenoah
Blades: SAB Composite
Frame: DIY
Here we can found the video : http://www.virtualrobotix.com/profiles/blogs/hg32-preflight-check
Here you can found the full story : http://www.virtualrobotix.com/profiles/blogs/hg3-the-era-of-quad-variable
Blog of Giuseppe Pipposoft for the friends ;) : http://www.virtualrobotix.com/profile/GiuseppeDAngelo?xg_source=activity
This requires us to develop a complete new product family which is based around a HD camera solution which meets the specific requirements for, lets say, an RC helicopter pilot. It should be small, very robust, but most importantly able to take care of vibrations caused by the RC model plane or helicopter. But it should stay affordable and allow easy additional data collection via quick and simple module based add-on’s which can be connected to the main unit quickly and easily without needing to engage in rocket science.
Part of the development plan is an HD downlink.
This ardupilotmega hardware in the loop block for scicoslab marks the completion of an open source, completely free autopilot design and testing tool chain. The jsbsimcomm block communicates with the ardupilotmega hil block to simulate an actual flight. Servos move in response to the autopilot and may also be manually controlled with the radio receiver. This isn't polished yet, but it's working and I'll be cleaning it up this week. I've used the boost asio library for serial communication so the scicoslab blocks should also compile on windows if your lucky. Will probably take some work if anyone wants to volunteer. :-). Source code is on http://hsl.dynalias.com/git/?p=JSBSim;a=summary
Matlab is the gold standard of physical computing simulations used with UAVs, including built-in Kalman filters. Now you can use it with Arduino.
From the Arduino blog: "I found a well and detailed step-by-step guide with codes and pictures on this presentation from Giampiero Campa who lead the webinar “Learning Basic Mechatronics Concepts Using the Arduino Board and MATLAB“:
The webinar introduces the ArduinoIO package, which allows the user to perform Analog and Digital Input and Output, as well as to control DC, Servo and Stepper Motors interactively from the MATLAB command window, without having to write, debug, compile, upload and run C programs.
you can downlaod the Arduino package from here."
I'm a bit late to the party in actually building a beta ArduCopter kit, but I just finished last night, loaded the code and set the motor rotation directions this morn. Then the kids and I took it out to our tiny backyard and just took off. This is the result--amazing. Rock-sold stability (this was in windy conditions, too) and no tuning required--these are the default settings. So much better than the Gaui 330 XS, both in terms of performance and setup!
Ted Carancho's configurator software is the key. Best setup experience I've ever had. It not only tests all your hardware, but really walks you through the process in an intuitive way. It looks great, too:
My only issue was the the rudder channel seemed reversed in the configurator, but worked fine on the quad. I'll dig into that a bit more. But the main point is this: ArduCopter is in great shape, and as far as I can tell, ready for prime time. Really looking forward to the commercial release in a few weeks. Huge congrats to the team!
"The Pixhawk Team at ETH shows off more progress on their QGroundControl, and discusses their development plans here. " From I Heart Robotics.
kbosak:
If you want to spare yourself digging through the project website, the groundstation itself has mailing group
http://groups.google.com/group/qgroundcontrol
and issue reporting + code download site
http://github.com/pixhawk/qgroundcontrol
Next problem i live in the caribbean, it has some advantages, like i can probably fly my uav just about anywhere and no one will say sh*t, and frequency use ... well... the local "FCC" is a joke, so i dont really need any ham licenses etc for running alternate frequencies are far as i can tell here.
Now the negative of being in the caribbean, their are 0 rc shops on island so everything is ordered from the US, so theirs no real "opps ordered the wrong thing" i have to get it right the first time around or else shipping will kill me.
I havent flown RC in a very very long time, and even then it was my dad's boats which clocked in at 70mph on water which was always impressive... But never really flew a plane, i am however a quick study.
Anyway thats enough intro to who i am, onward to Operation Overkill!
Operation Overkill Mission Plan: To build a "heavy lift" RC QuadCopter utilizing opensource hardware/software.
Operation Overkill Success Goals
1: Ability to manually fly using FPV
2: Ability to autonavigate way points for geophotomapping
3: Capable of 15-20 minutes of sustained flight fully loaded with hardware
4: Able to aim and trigger a high quality camera.
5: Stable flight and video recording for video work.
6. Total flight product under 800$
Operation Overkill Hardware
--- Basic Brains ---
1x ArduPilot-Mega - $60.00
1x ArduPilot-Mega IMU - $160.00
1x MediaTek MT3329 GPS 10Hz + Adapter - $40.00
1x HMC5843 - Triple Axis Magnetometer - $45.00
--- Power Plant ---
1x TrueRC 11.1V 8000mAh Li-polymer Battery 10c = 565grams - $110
4x X2217/08 Outrunner hangit rc 18 amps max http://www.eastrc.org/estoremotorselectric.htm - 32$*4 - $128
4x 10x5 APC e Props http://www.hobbycity.com/hobbycity/store/uh_viewItem.asp?idProduct=5440 - 1$ *4 = 4$ + extras
4x 3.17mm Prop Saver w/ Adapter & 3 bands http://www.hobbycity.com/hobbycity/store/uh_viewItem.asp?idProduct=3739 4x $2.99 = $12
4x Turnigy Plush 30 amp ESC http://www.hobbycity.com/hobbycity/store/uh_viewItem.asp?idProduct=2164 4x 15.40 = $60
*** I've read that the TrueRC batteries are awesome and cheap, the hangitrc motor had the highest thrust i could find in such a small package and low price, 32$, 70 gram unit, and 1150grams of thrust with the 10x5 e prop, although i'm having issues finding the APC e prop for CCW or am i missing something? the prop savers, i dont know if they are really designed to work with 10x5 props but as i said i dont wanna be ordering new props every week given where i live any experience with prop savers on quads with bigger rotors?
--- OSD/Telemetry ---
*** I'm still not sure what to do here, i wanted a good OSD but the one i saw that works with ardupilot forces use of a smaller gps module from what i saw and i want high gps reliability for when its on autopilot... The alternative is xbee pro for telemetry and just a standard ccd with broadcaster without an osd... any input here would be great.
--- TX/RX ---
1x Turnigy 9X 9Ch Transmitter w/ Module & 8ch Receiver (Mode 2) (v2 Firmware) - $70
--- Camera Hardware ---
*** I'm still researching how best to integrate/mount/trigger a camera using ardupilot mega, as i'd like to have some form of camera stabilizer mount below that i can rotate and turn that would also hold the osd camera that way i could actively see what i'm aiming the high def camera at, switch on hover, aim the cameras and trigger a nice snap shot fromt he air... Or program waypoints (once thats available) point the cameras straight down and do geophotos, tips and suggestions are welcome.
--- Airframe ---
To start i'm looking to get some metal towel rods for arms, and hopefully will be able to find some teflon/rubber washers so that i can pressure mount the motors onto the rods instead of drilling them... the plates for the electronics, i'm considering trying to find some flat plastic boards and then covering the contact points with the electronics with a little bit of rubber to reduce vibration on the electronics even further.
This setup would primarily be used for just testing and getting the hang of the unit i eventually want to get a unit from Jakub or maybe build out a carbon fiber frame once i'm sure of my hardware that will handle a camera mount
-------------------END OF HARDWARE---------------------
Price wise I'm at 630$ and i'm missing the camera, airframe, telemetry and radio.... wow i don't think im gonna make that 800$ goal.
The way i see it at max thrust the engine and prop combo can put out 4600grams of thrust. I don't really want to be using that much as i'll drain even the 8000mah battery in what, 5-6 minutes so i should be looking to keep the total load at about half that 2300grams, right? That way i can maximize battery availability by not having to run the motors hard ever.
280grams motor + 570 grams battery + 400 grams for the airframe worst case + 200 grams of circuit boards (i have no idea how much the ardu pilot stuff weights along with the radio and telemetry) + 100 grams esc
That would bring me to 1550grams allowing me to lug a camera of up to a 1kg without stressing the engines or battery... i kinda wish i cud get my non-payload weight down some.
Anyone see where i could save some cash? Or alternatives for the above hardware? Holes in my logic etc would all be appreciated greatly.
Wow is it just me or is 40.7oz * 4 - 1450 grams airframe mean i could lift a 7 pound baby? lol Not that i would LOL
Please comment if you'd like to add or remove an entry.
DIY Drones: @DIYDrones
DIY Drones members
Chris Anderson: @chr1sa
Doug Connell: @dougconnell
Garry Qualls: @garryqualls
Gary Mortimer: @sUASnews
IKE: @erripman
Jaron: @jarontec
kevin kitchin: @kitchin01
Melih Karakelle: @flytron
Scott James: @MelbourneUAV
Hi there.
This being my first post and all please bear with me.
Having read through an number of posts on airframes for armature UAV's i'm left a bit baffled.
I do understand that some people are more into electronics and software than building airframes but i find it quite odd that a modified Easystar seems to be the "donor" plane of choice.
I know that the mods are endless and there's even a guy that writes about building and selling Easystar carbon fuselages here but from what i can tell the fuselage and the fact that ailerons are not standard
is the Achilles heel of the Easystar.
Obviously threes no reason to reinvent the wheel so i was thinking along the lines of combining the wings of something like a "BMI Arrow", "AXN Floater jet" or "Dynam Hawksky" (they are all Easystar type planes
but with ailerons) with the fuselage of something like "Penguin-B UAV" or "Team Javelin" which should basically result in a platform as stable as the Easystar but with a lot more room and freedom for payload placement.
Anyways... My point being (although a bit obscured). How about a joint venture. There's loads of brilliant people with tons of experience in here. Why not define a "standard" DIY Drone platform that will suit the majority of projects?
Please let me know you thoughts.
Lets get a list of requirements together and see what happens.
Kindest Regards
/Stig
Beauty crash. Every day has ended in a crash since the last blog post. Had the propeller mounting bolts come loose. Had battery voltage suddenly drop to 9.11 & a complete loss of attitude control.
Found cyclic integral isn't resetting between autopilot flicks.
Attitude hold mode is a joy to fly manually. She flies like the Corona again. Very stable & more visually satisfying than a bunch of symmetric propellers.
The helix was extremely noisy & random so it was time to try different orientations. The vertical orientation proved 2 satellites worse than the horizontal orientation. Unfortunately it is not completely omnidirectional. The only difference was from positioning the module on the nose.
Overall, the helix is getting 4 fewer satellites than the patch though its satellite count is more stable than the patch. If the module is mounted where the patch was, it's completely worthless. It's extremely fragile & really hard to mount. All roads are leading back to different mounting locations rather than different antennas.
No more sunny days until 2011, but there's always a party in Cloudyvale. This time it's another ducted fan VTOL that didn't work. Suspect control surfaces were too small & PWM was 50Hz. So basically, photos taken when recording video have the same resolution as the video.
Relations with the Air Force turned slightly better last Saturday. We'll see how that goes.
Funny how US is going in the exact opposite direction to the rest of the world in aerospace. Maybe you'll still get the Lady Gaga helipad.
I just added a simple stability augmentation system (SAS) to my autopilot code. I am posting a video of the very first test flight. As you can see if you watch it, I had some success, and there were a few things to tweak for the next flight.
I've posted a few more details and explanations here:
This is my first crack at an SAS, and it is very simplistic. The pilot stick inputs map to roll and pitch *rates*. When the pilot centers the stick, the SAS holds the current target roll and pitch angles as best as it can. For now I've let the pilot have direct control over the throttle and rudder while the SAS is active. This allows the pilot to taxi on the ground to set up a take off. It allows the pilot to steer with the rudder while the SAS holds the wings level. I'm not convinced this is the best arrangement, but for a first crack it certainly is workable. By my third flight I was able to taxi to the end of the runway, do a full wheel take off, fly a complete flight, and finish with a smooth landing -- with the SAS turned on from start to finish.
I have a few questions though.
Is it fair to call what I've put together an "SAS" or is there a better term I should be using? I hate playing acronym of the day though. In this field everyone likes to make up their own variants anyway. I've set up my system so that stick deflections map to roll and pitch rates and then the system holds the current bank and pitch angles when the stick is centered. This works pretty intuitively as long as you recognize and account for some latency. But how have other people rigged up their systems? What do people feel works the best and is most intuitive from a pilot's perspective? What is the ardupilot mega doing?
Thanks,
Curt.
ARDUROV T100
- PRELIMINARY PROJECT ANALISYS -
Overview
ArduRov is an under water electrical vehicle controlled by the surface trough an umbilical cable, operator drive the Rov by the image of a camera and with the help of various sensors.
The goal of the project is the realization of a cheap ROV, a rock solid open source software, a modular design for a safe and easy use
The project could be divided in different parts, to be discussed and developed.
Surface Electronics
A small box with the power supply , Surface telemetry electronics and the video output
Options:
BASIC: A Simple Plastic Box with Input/Output connectors, PC or R/C Joystick
Advanced: A Case with LCD Monitor ,Telemetry Overlay or second LCD, A PlayStation JoyPad
PRO: A Consolle with HD Monitor, Overlay, DigitalRecording, Custom JoyStick etc
Umbilical Cable
To maintain a low cost the umbilical cable will be a standard multipolar PVC cable with at least 8 conductors, section of the conductor is to be defined depending to the final amps consumption.
My Idea is start with 50 mt of umbilical cable to avoid the needed of a winch to handle the cable.
All parts of the ArduRov Basic must be projected for a pressure of 20 bars (-200 mt)
Options:
BASIC: 30 mt of PVC 8 Conductor Industrial cable
Advanced: 100 mt of Kevlar armoured cable with hand winch
PRO: 200 mt of Kevlar armoured cable with motorized winch
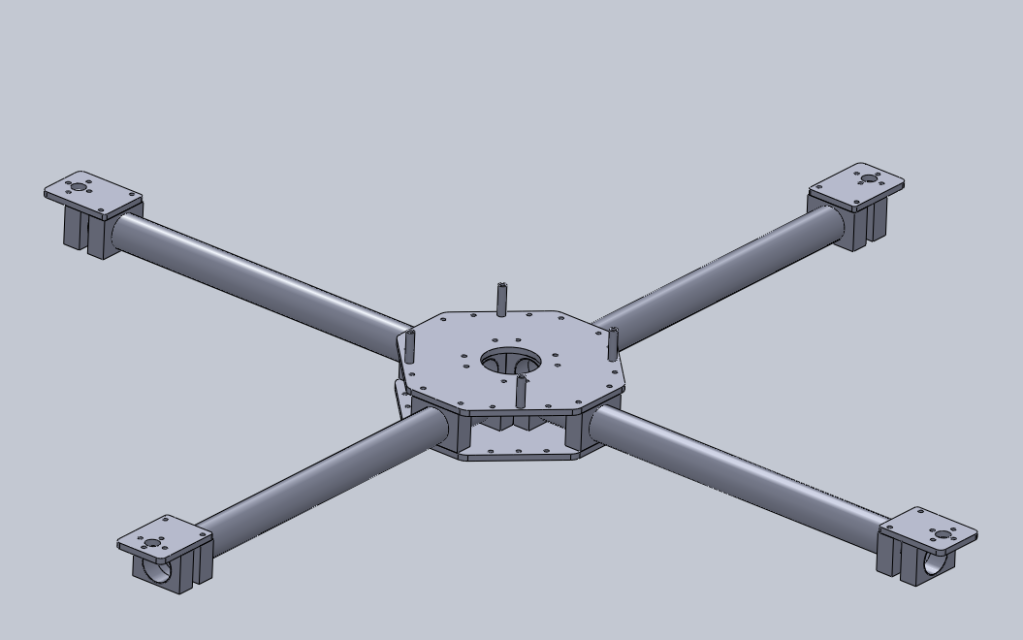
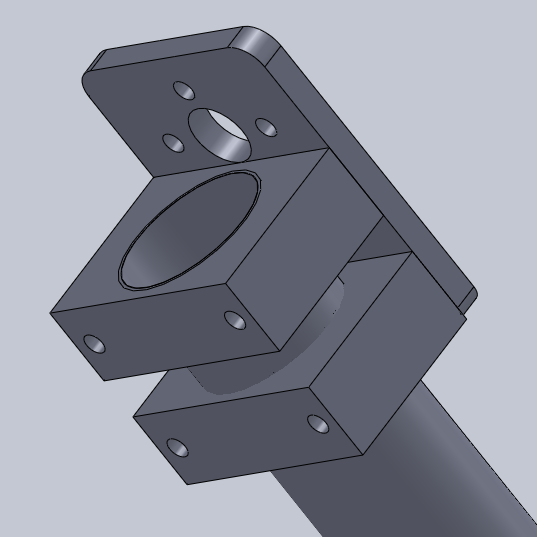
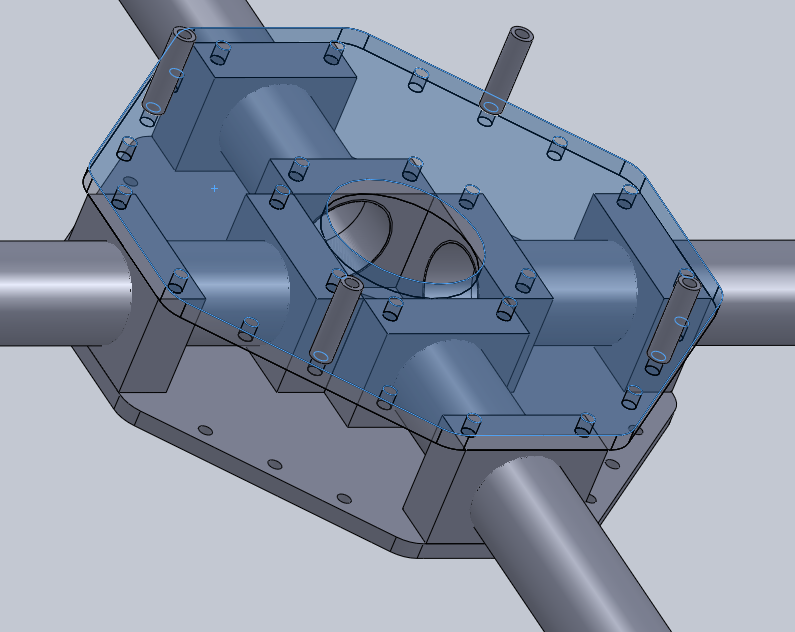
ROV Frame
The frame must be as modular as possible, corrosion free, and with a low water drag.
For my experience the best way is use two polypropylene mono-block shoulder connected by Anticorodal Anodized “U” profiles. Carbon Fiber will be the next spet to reduce weight in air.
The profiles will be used to fix the thrusters, the underwater electronic pod, camera, lights etc
Options:
BASIC: polypropylene / Anticorodal frame
Advanced: Carbon Fiber/ Anticorodal frame
PRO: Full Carbon Fiber Frame with hydrodynamics surfaces
Buoyant System
To Compensate the weight of the ROV a buoyant system is needed, there are different method to add buoyancy but the most reliable will be the use of block of a special close-cell polymer.
A cheap solution could be polystyrene but it will fault at more than 5 bars (-50mt)
Options:
BASIC: polystyrene
Advanced: close-cell polymer
PRO: close-cell polymer with Carbon Fiber Coating
Thrusters
Propulsion is one of the most important thing in an ROV, We plan to use 3 , 5 or 6 thrusters to control the vehicle. Basically One or two thrusters are vertical and controls only the depth and eventually the tilt of the ROV and two or four thrusters are disposed on the same plane as in the following scheme:
This configuration allow Reverse , Forward , Left, Right and Rotation movements, to archive more thrust rear propulsion could be oriented differently.
The main problem of the thruster is the design of the underwater housing to resist at the pressure and at the same time not reduce the mechanical power, there are several different techniques to do this:
- Direct Shaft output with O-rings (cheap but with poor performance and frequently maintenance)
- Ceramic Shaft Seal with Oil Compensation ( Expensive and need special tools to fill oil )
- Magnetic Coupling with Dry Motor and magnetic Follower ( A bit more complicated design and project costs but virtually no maintenance and good efficiency )
Motor type should be Brushless sensorless, this type of motor can be controlled by an Electronic Driver and perform a good torque and a good power/dimensions balance.
We need to find a good motor with a very low Kv to have the maximum torque and reduce the RPM.
A good rpm speed could be around 2500 Rpm at full thrust.
Options:
BASIC: cheap R/C Brushless motor with direct shaft output with O-ring
Advanced: Industrial Brushless motor with hall effect position sensors and magnetic traction system
PRO: Custom Brushless Motor with hall effect position sensors and magnetic traction system
E-POD
Basically the epod in the brain of the ROV, is an Anticorodal cylinder with connection on both sides.
One side receive the umbilical cable and the other side have all output (Thrusters , camera ,lights etc).
In the e-pod there is the electronic board and the Power conversion board to power-up the brushless motors and to convert Voltage to an appropriate value for all the equipment installed.
One part of the e-pod side will be reserved for sensors (Depth sensor, compass, temp sensor etc )
Options:
BASIC: Anticorodal cylinder with cast resin cable connections without sensors
Advanced: Anticorodal cylinder with underwater connectors + depth sensor and compass
PRO: Anticorodal vaacum cylinder with underwater connectors + depth sensor , compass , temp sensor , altimeter , and Lipo Power pack optional connector for UAV conversion.
Camera
Camera is the underwater “eye” of the pilot, could be standard 640x480 resolution or HD depending on the scope of the ROV. It is composed by an Anticorodal or Derlin Cylinder with a correction lens at one side and a connection cap at the other side. For standard resolution we will use a video-baloon converter/amplifier and a twisted pair to send video to surface.
Camera could be static or remote tilted to allow a panoramic view
Options:
BASIC: Standard 640x480 b/w camera with fixed focus and fixed iris
Advanced: Standard 640x480 color camera with fixed focus and fixed iris with remote tilt possibility
PRO: HD Camera with remote zoom , focus , Iris with pan and tilt possibility
Light
Lighting is very important underwater, especially in sweet water where you will be in the dark at few meters deep. A natural light is required for a good view and we can use halogen or led source for our purpose.
Options:
BASIC: 2 x halogen light with on/off control
Advanced: 2 x halogen light with dimmer control
PRO: 3 x halogen light with dimmer control
________________________
This is a very preliminary and personal analysis, feel free to comment, add, contest everything... and sorry in advanced for errors.
Taborelli Flavio
Original blog post : http://www.virtualrobotix.com/profiles/blogs/ardurov-project-remote/
Together with the Laboratory for Energy Conversion of the ETH Zürich we have adapted their multi-hole air flow probe to Paparazzi and integrated it into our meteo Funjets. It is used to measure wind vectors/turbulences around wind turbines for a more efficient planning of wind parks. The goal is to reduce the impact that a turbine causes to the ones downstream. Swiss television has an article (in German).
More details and pictures on my RobotBox project page. Any suggestions on getting it to work? I can't seem to find any mini RC helis that have props rotating in a direction opposite the ones on there.
Also, I'm looking for more flying robots to be added to RobotBox. It's a little light on aerial stuff :)
Swiss engineers demonstrate onboard visual navigation scheme on the Pixhawk quadrotor. Rapid disturbance response is achieved through low CPU usage and 30ms latency from shutter to control output.
Here, UPenn brings it to life with indoor navigation - another ROS compatible project. This demo involves processing much larger data sets and relies on some remote computing to crunch the numbers: http://diydrones.com/profiles/blogs/autonomous-multifloor-indoor