Gremsy PE is purpose-built for an effortless integration with Auterion & Mavlink compliant drones. With its ease of deployment and simple operation, the new lineup is a perfect enterprise-ready solution.
Adhering to the Pixhawk Payload Bus standard, Gremsy PE is equipped with a new quick-release operating on a sliding mechanism, helping PE gimbals plug and play with most Pixhawk-based platforms, including Skynode, Pixhawk and Cube. I/O interface on the PE hub makes it simple and straightforward to connect with your Flight controller system and companion computer.
In collaboration with Auterion, we create Gremsy PE for seamless integration with the Skynode system. Now it’s your turn to deploy fully advanced Auterion’s drone ecosystem capabilities for industrial missions.
And with MAVSDK & gSDK compatibility, Gremsy PE allows you to develop products or applications related to gimbal control by connecting the COM2 on PE Hub to your system. Gremsy PE is now available in two versions: T3 PE and Pixy PE. Both support similar cameras to their standard versions, offering a variety of payload options to suit your needs.
Pixy SM is specially designed to integrate the leading professional M300 RTK drone with the full-frame mirrorless Sony α7R IV camera, offering an unbeatable combination for precision aerial mapping missions.
Utilizing the built-in advanced processing module, integrating with M300 RTK is quick and straightforward within seconds. Just mount, connect, and you’re ready to go.
Pixy SM is optimized to work perfectly with the 61-megapixel Sony α7R IV, ensuring that you can get high-resolution imagery for creating accurate maps. In concert with M300 RTK and Sony α7R IV, Pixy SM brings out the best-ever-grade mapping solution for geospatial experts.
With Pixy SM, the most powerful drone and superior sensor are now perfectly combined for industrial operations, making your entire system clean and easy to deploy.
It’s been almost a year since being stuck on a remote Fiji island, due last year local COVID travel restrictions. The island that split in half by the international date line.
The restrictions have been lifted, but I am still there, mapping parts of the island.
I use Open Drone Map open source project to process my mapping.
At some point I got a number of maps, but not many easy, fast and simple options to share them with my clients or with whoever else I needed to share them. Share with those, who does not have GIS background, tools and knoledge to open geoTIFF files. I also needed to conveniently store and archive some of my maps online where they could be easily uploaded through slow internet line, accessed, shared, done some simple operations on them like area and distance measurements etc.
So my brother and I both software developers and myself with some drone and mapping background started this pet project.
It took some time to figure out and put some complex things and logic to work together. Like Geoserver for example. Some modules from our previous projects, some Golang and JS programming time, to make it all work under the hood. It still in development and might have issues, I am currently working on improving the user interface, while my brother takes on complex backend challenges, nevertheless I already find it pretty handy to use it for sharing my own maps. In case someone wants to try it too and give some feedback, feel free follow the link bellow.
It might not work in Safari browser though as we’re not fortunate Apple device owners, so it's never been tested there. In case someone tries it in Safari and it does not work, let me know we will try to do something about it but Chrome is the browser for now.
So what MapHub can do for now.
You can upload your processed geoTIFF images in different ways, By uploadig in your browser directly or by feeding it with Mega or Google Drive cloud storage links so you files will be pulled and adopted in the background.
It might take some time to process the images depending on their size, but at a result you should see them projected on the world map. With either OSM or MapBox satellite background.
There are some vector tools on the right that can be applied over your map for some marking or measuring purposes, they are still under development but work in general
It's handy collaborating. So I can put some mark over my geoTIFF map and someone else can see them and add theirs.
You can share your maps with others, making them public or private with permission to access them for specific people only
Make your maps “read only” or allow people to put vectors over them for some collaboration work
Share specific extent of the map in full access or “observer” mode
Allow to download the file for your client or just view it
In order to upload maps and do stuff you will need to sign in. Sign up / Sign is currently possible through Google account only.
Feel free to share your feedback and features ideas if you tried it, found it useful for yourself and thought of some extra features that would be good to have there.
Bellow there is a link zoomed to Fiji where I display some of my maps for demonstration purpose, but feel free to zoom to your area and upload and share your stuff.
Dronetag device is most often used by our partners in the following situations:
as a device for remote identification for drones such as DJI Phantom 4, DJI M200, DJI M600,
in cases when you need to coordinate with other entities,
when you need all flight data in one platform,
if you really do not like to lose your drone.
Let's get into more details...
1. Remote identification for any drone
Remote identification of drones will be mandatory for all flights in a Specific category from June 2022 and in U-space airspace from January 2023. So if you have older drones such as Phantom 4, Matrice 200, Matrice 600, etc., where probably no firmware update from DJI will come out, then Dronetag Mini will still allow you to fly more advanced scenarios in the Specific category / U-space. You simply won't end up in the limited Open A3 subcategory.
Dronetag Mini is a remote identification device designed as an add-on that can be mounted to any drone. Mini ensures that your drone is visible for all air traffic participants. It is no larger than half of your favourite müsli bar, weighs 32 grams and stays charged for up to 8 hours.
Mini receives the drone’s coordinates from GPS, GLONASS, Galileo and EGNOS satellites, and sends it, along with the drone identification, in real-time to the central system through a mobile network, or to everyone around via Bluetooth. Moreover, Mini includes an extension port for connecting and remote control of third-party peripheral devices.
2. When you need to coordinate with other drones
If you have a project where you need to coordinate with other entities such as a supervisor / guard / director, then Dronetag web and mobile app allow everyone involved to see if the drone is in the air and where it is.
3. All your flight data in one platform
If you combine different types of drones like copters and wings (or even combine different drone manufacturers), you can have all your flight data in one platform and available at any time. We can be your simplified variant of AirData / DroneLogbook but independent of the drone platform/manufacturer.
4. Never lose your drone
If you happen to occasionally lose the RC link to your drone and want to know what it's doing and where it's going, you'll never lose track thanks to the Dronetag Mini's LTE connection. Even if the drone flies away.
Headquartered in Tokyo, Japan, AfterFit is an electric power company specializing in green electricity generation, transmission, and sale. Since inception, they have been on the mission to accelerate the shift to renewable energy. Although increasing the number of renewable energy power plants is difficult due to the land constraints, AfterFIT has been scouring Japan’s landscape using satellite data, automated drones, and AI tech to find the most viable locations for renewable energy production.
With the in-house expertise to handle everything from power plant development to power supply, maintenance, and asset management, they are well-equipped to offer comprehensive solutions and provide decarbonized energy without incurring the conventional cost increases. In addition to 25 domestic bases, they have recently expanded into Vietnam and Indonesia.
The Hurdles AfterFit had to Overcome
The challenges in Japan are two-fold:
Workforce Scarcity & Capital Intensive:
The rise in Japan’s elderly population has had a significant impact on the availability of personnel across all industries. AfterFIT, for example, is experiencing a shortage of chief electrical engineers for power plant maintenance and management as it expands to a new location.
They need not only labor-saving measures to accommodate an ageing population, but they also need to invest heavily in round-trip transportation of staff members to and from the site. They also needed to ensure that two technicians are available within two hours of a mishap. Furthermore, with the end of the feed-in tariff (FIT) for photovoltaic power generation in March 2032, additional cost reductions are critical.
Copper wire Thefts:
Thefts have become a common occurrence in Japanese power plants in recent years, with several thefts reported each year at the same power plant, resulting in significant losses.
Copper wire theft is a distinct problem that not only increases the immediate cost of the replacement but also reduces the amount of electricity generated because the time required to complete the repair or replacement increases. This necessitates countermeasures to keep them from happening.
Drones for Solar Farm Inspection: How it all started
In response to these challenges, AfterFIT began using drones in an effort to “solve green power difficulties with technology”. With over 50 qualified pilots spread across 25 domestic bases, AfterFIT has been using drones for conducting surveys required for solar power plant inspection, construction, and design. An in-house application software for autonomous navigation has also been developed to enhance productivity through AI analysis of acquired photos.
Drones helped them in reducing the time required to inspect a MW from 3 hours to less than 10 minutes.
The process became more efficient, saving time and resources, but the labour shortage remained.
Solution: Modular DiaB systems to the rescue!
As a solution to the labour shortage, companies in Japan have developed and used a dedicated drone for power plant maintenance and inspection. The system including the charging port, costed around 10 million yen, posing a cost-effectiveness barrier to practical use.
However, AfterFIT was one of the first renewable energy companies to put a modular automated drone docking station into practical use at the power plant (1,924KW) in Ashino, Nasu Town, Tochigi Prefecture.
Without any operator or assistance on-site, AfterFit was able to conduct a level 3 (non-visual, no assistant) solar panel inspection. By utilizing commercially available off-the-shelf drones manufactured by DJI, the world’s largest drone manufacturer, and a compatible Drone Nest by Heisha, AfterFIT was able to reduce the cost of equipment and operations by more than half.
With FlytNow Auto software, they were able to carry out all operations remotely from the Tokyo headquarters, which was about 200 kilometres away from Ashino. The intelligent & reliable precision landing module provided by the software ensured the drone landed on the docking station, every single time.
The drones could fly autonomously along a predetermined route, inspect solar panels, and live stream infrared video feed and images back to the command centre. Each inspection takes about 20 minutes, and charging takes about 60 minutes. Its applications also include security monitoring systems, in which the drone can fly to a suspected anomaly and provide sufficient warnings to both management and any potential intruder. In addition, AfterFIT created an AI-based system in-house to generate power plant anomaly reports.
Following the completion of the demonstration experiment at the company-managed power plant, AfterFIT intends to expand its drone station operations to a non-company-managed power plant.
Added Perks!
In addition to the labour & cost saving, the deployment of a fully automated drone docking stations has the benefit of boosting flight frequency, which saves money in the long run.
While previously, solar power plants were only inspected four times a year; drone nests have, however, made it possible to inspect more frequently. Weather events, such as typhoons or severe rain, might generate irregularities in energy production that can be discovered more quickly and efficiently. AfterFIT has been able to deliver lower-cost maintenance services of higher quality by offering these advantages to the company’s whole customer base.
Drone Docking Stations are Here to Stay!
With such incredible benefits in the renewable sector, DiaB systems are unmistakably on their way to taking the world by storm. Watch this video by Yuji Kuwamizu as he walks us through at NestGen’22 Keynote:
We, too, are excited to see how the integration of automation and drones will make processes, productivity, and production more efficient, faster, and larger as it pervades practically every industry!
Posted by Utsav Chopra on March 24, 2022 at 3:38am
The most recent technology breakthroughs in the commercial drone industry have propelled it to an entirely new level. Previously, a drone's entire flying cycle had to be continuously piloted and monitored. Fortunately, we have entered an era where drones can complete their predefined missions from start to finish while the operator is away. And drone-in-a-box systems have played a pivotal role in making this happen. These systems eliminate the need for human intervention by allowing the drone batteries to be charged/swapped autonomously, saving time, effort, and money.
Until now, the industry had been familiar with "Closed DiaB Systems," wherein a single company built everything. They invest in each segment, from building the drone to the box to the software to selling the system directly to end-users, making it expensive to produce and consume. To address this issue, FlytBase advocates for an "Open DiaB Movement" wherein hardware manufacturers, software providers, and DSPs collaborate in their areas of expertise to build and sell a modular system that reduces costs and improves efficiency.
The Panel
The "Open Diab Movement" concept was reinforced during a panel discussion held during the NestGen'22 summit, where ground warriors advancing this technology and deploying it in many industries - the DSPs - shared their vision. Among the experts present were:
Tariq Nasraldeen, Founder & Chief Aviator at Firnas Aero in Saudi Arabia
Yuji Kuwamizu, a UAV specialist at AfterFIT, Japan,
Mohamad Shawky, Founder & CEO of Geodrones Aerial Services and,
Elia Ray Salem, Project Manager at DroneBase, Italy.
Industries likely to see rapid adoption of DiaB systems
The conversation started with one of the most frequently asked questions: "Which industries would see the earliest or most rapid adoption of drone-in-a-box systems?". The four experts cover several industries that would profit from full autonomous system deployments in their respective regions.
Drones for Oil & Gas Inspection
In the UAE region, Mohamed discusses how drone docks have made inspection and surveillance of oil rigs and pipelines that span kilometres easier and safer for personnel. Monitoring leaks or gas emissions, detecting spills and detecting corrosion in offshore rigs, solar panels, and remote facilities have become convenient in topographically and climatically challenging areas such as Dubai. The DiaB systems are weather and heat-resistant. An internal cooling system allows for much easier aerial mapping and surveying than was possible a few years ago when drones were not autonomous.
Drones for Security
Tariq adds to the conversation by discussing how autonomous drones have transformed security operations. Previously, large facilities had to be physically patrolled despite inclement weather, which made the procedure unreliable, inaccurate, and often even unproductive. Adding AI and object recognition technologies has made patrolling much easier - everything is now detectable, from a license plate to a wrongly parked car. The ability to attach payloads like thermal cameras or sensors to drones has further rendered the manual process obsolete.
Drones for Renewable Energy
Yuji brings a unique perspective to the discussion. According to him, in Japan, standard surveying approaches are highly ineffective since most solar panels are installed on mountainous terrain. With the integration of off-the-shelf drones, DiaB systems, and advanced AI, AfterFIT Japan can now conduct remote photo imaging, anomaly, and soil inspections in less than 10 minutes, at a significantly lower cost. Yuji emphasizes the benefit of autonomy, stating that operations are not hampered by external factors such as inclement weather, resulting in increased productivity.
Obstacles hindering full utilization of DiaB systems
Despite increasing awareness of drones, their capabilities, and advancements, Elia states there are very few drone companies in Italy, and DroneBase has to build market awareness through significant investments and continual promotion. Last year, they held live demonstrations at the NATO military airport to raise awareness (the testing ground for manned and unmanned systems). With several high-profile individuals from the military and other relevant industries in attendance, they attempted to highlight the benefits to aid regulatory bodies in their decision-making process.
An aspiring drone entrepreneur? Don't miss out on industry experts' advice!
Each with a wealth of knowledge and lessons learned, the panellists shared their insights with aspiring drone entrepreneurs. Mohammed stated that today's entrepreneurs must spend time and effort constantly self-reflecting and addressing the demands and concerns of their customers. It will, in his opinion, help entrepreneurs fine-tune and hone their services.
Speaking of customer demands, Tariq says that it all comes down to the client's requirements at the end of the day, which entrepreneurs should not lose sight of. He also believes that instead of catering to everyone's needs, aspiring entrepreneurs should try to specialize in different industry segments. Every segment necessitates a different set of expertise and skills, and one should strive to make their area of expertise a differentiating factor as well.
He recalls a conversation he had with a client years ago in which the client said, "I don't care what drones you're using, autonomous, non-autonomous or whatever, I just need my data to be accurate and timely."
Should one be scared of Drone Autonomy? We think not!
The panel concludes by addressing the concerns that arise during the initial phase of any modern technology. With drones and artificial intelligence coming in, there is concern about the loss of employment. The panel, however, disagrees with that viewpoint; Mohammed affirms that "DiaB will not cut jobs, but instead create more jobs."
He explains how, even if drones become fully autonomous, the industry will still require human involvement in mission planning, management, and monitoring drone flying cycles. Furthermore, we are a fair distance away from the day when regulatory bodies approve the flight of drones without a pilot, whether autonomous or not. There are several checks and balances that must be considered. Even reductions in certain job profiles will be offset by an increase in the creation of new job profiles and technological advancements.
To summarize, while long-distance travel, unfavourable working conditions, and repetitive flights would no longer be part of a pilot's workflow, drone autonomy could lead to more fulfilling careers for pilots in areas such as R&D, data analytics, and people/human-centric operations that require not only relevant knowledge and experience but also human characteristics such as empathy and general perception.
Watch the following video, to hear from the industry experts themselves. Watch complete event On-Demand, visit here.
Posted by Ahmet Coşgun on February 16, 2022 at 3:00am
Me and my friend Alperen Akküncü have been working on an open-source INS/GNSS system for a while. We came up with an open-source INS/GNSS module for implementing various navigation algorithms. Out of the box, It’s shipped with its default algorithm which is discrete architecture loosely coupled EKF/NCF. Pellicanus has castellated pins which makes it easy to integrat into your own projects or you can use the development board to play with algorithms that we provide or your own navigation algorithm.
Recently we started the pre-launch on CrowdSupply. Here is the link to our page if you want to subscribe:
The main processor we use is RP2040 from Raspberry pi which can be programmed with C or micropython. We will be providing many micropython scripts fort he ease of development.
Both hardware and software are open-source sysyem. All of the algorithms and KiCAD Project will be shared on out github page. You can either implement your own algorithm or use our algorithm that we provide.
Here are some 3D pics of Pellicanus
This is the development board for pellicanus. It includes qiwiic connector, sdcard interdace, USB connector, various pins and LEDs.
This system is an INS/GNSS module. It gives you the opportunity to implement and test many algorithms. PELLICANUS is a tactical level system. You can program it with the development board and use it with the development board or in your own bardu.
In addition, It has a GUI where you can test many AHRS and some Navigation algorithms and graph them.
This is the old version of pellicanus. We pivoted a little bit because we want pellicanus to be not only a development board for navigation but also for integrating to actual projects!
Posted by Saulius L. on January 24, 2022 at 6:13am
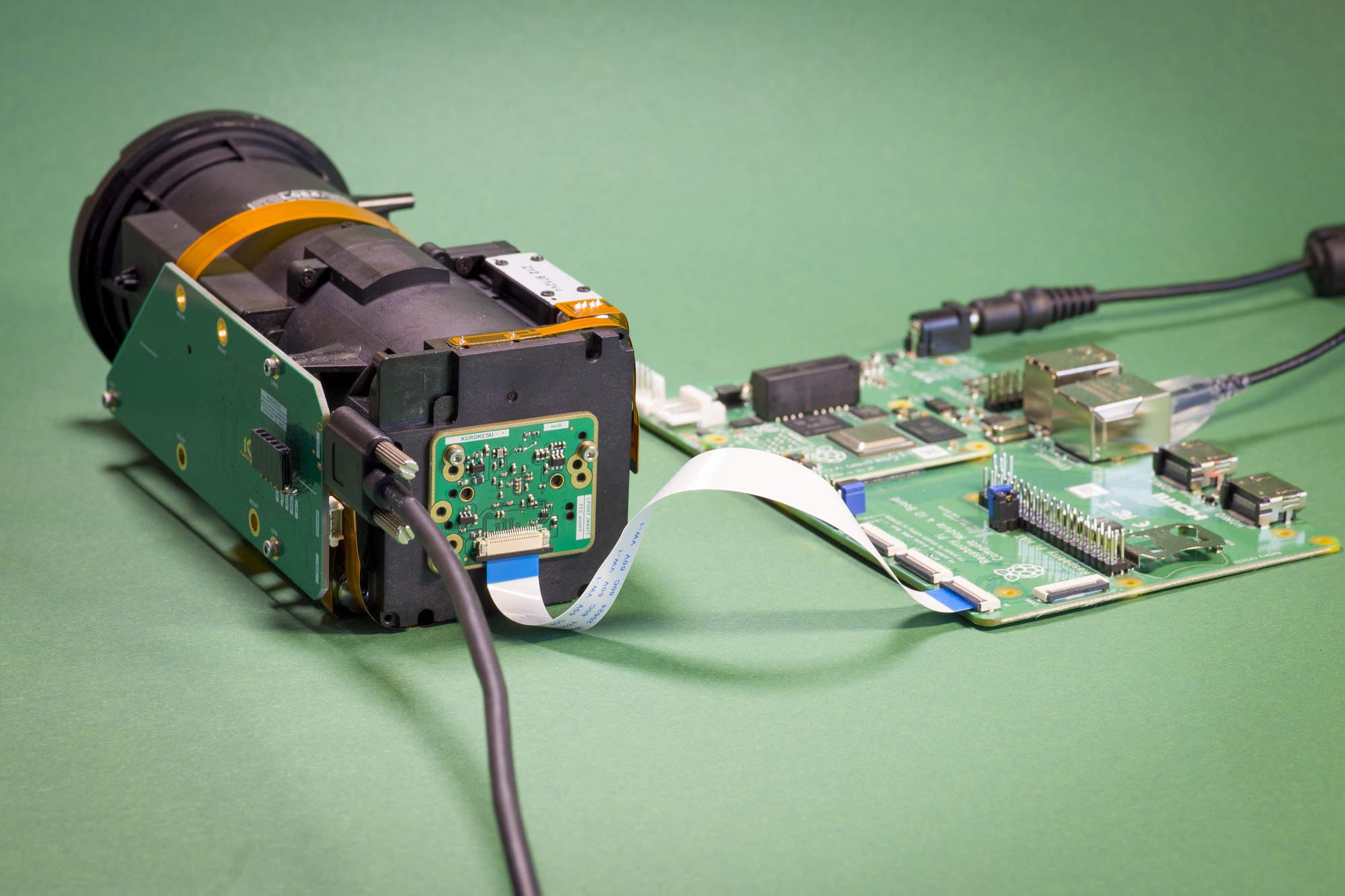
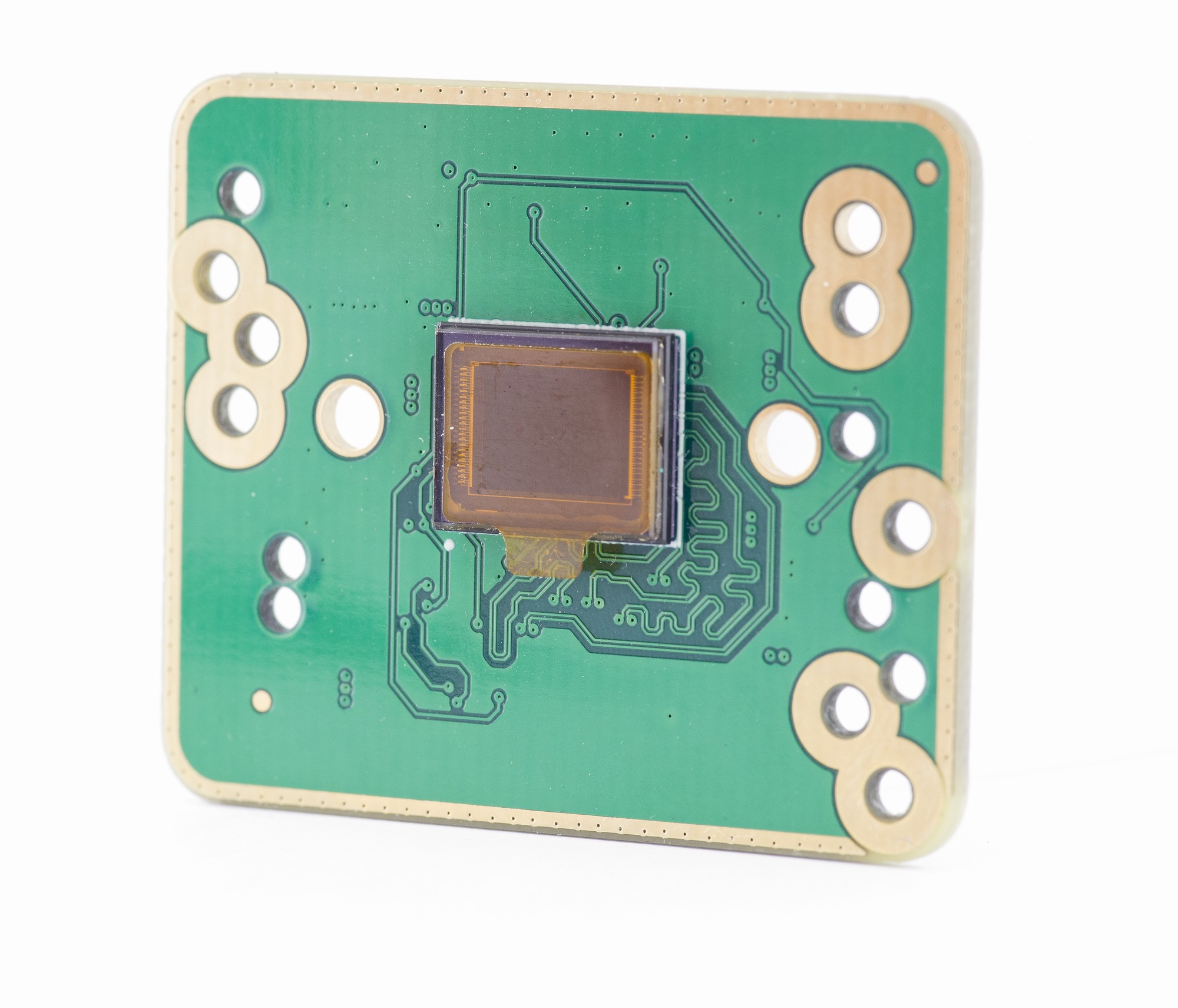
With the introduction of motorized zoom lenses, the next logical step was matching the sensor board. Sure there are countless suitable sensors from various manufacturers like Sony semiconductors, Onsemi, Aptina, and many more. But lack of good support from the SOC side suggested starting from IMX477. It is a reasonably modern 12M image sensor used by many single-board computers like Raspberry Pi, NVIDIA Jetson, and others.
Raspberry Pi locks cameras with a security chip and prohibits non-authorized cameras with standard boards. Luckily this security feature is not used by compute modules. Motorized lenses have dedicated, and in most cases, unique direct mount features. So a custom camera module is a must, thus introducing the IMX477 MIPI CSI2 camera board.
This is the first of a few upcoming camera modules. Note multiple mounting features – this allows single-board use with many lenses.
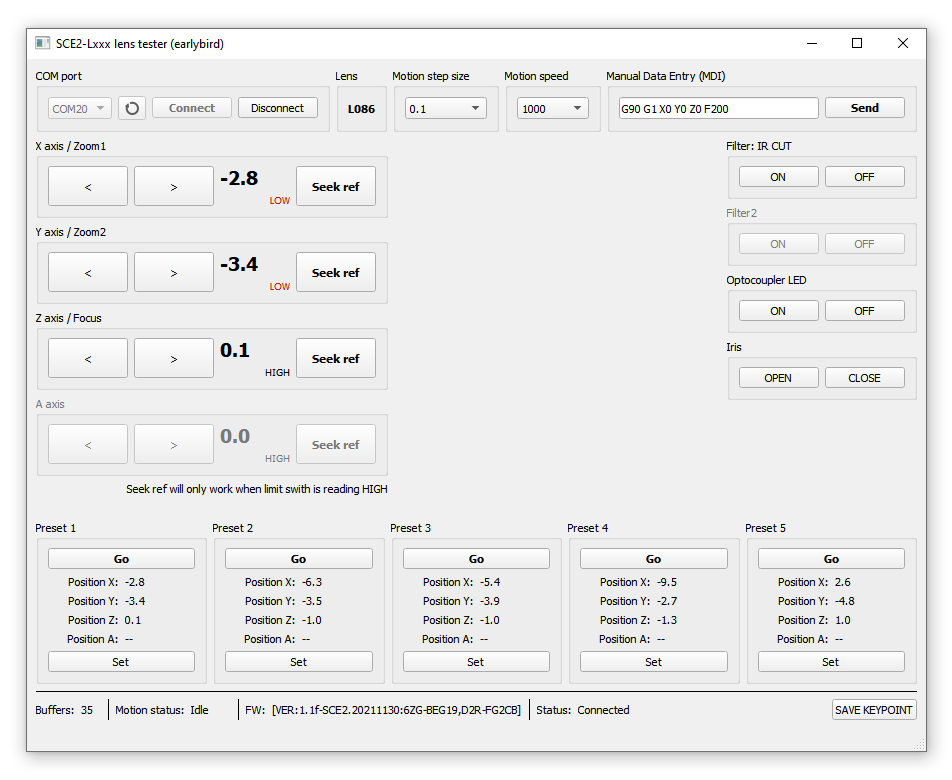
Features of the lens kit:
Lens optical train – 3 stepper motors for Zoom, Focus and compensate lens groups
Iris
Two optical filters: IR CUT and NIR
Reference optical train elements
Runs on GRBL firmware ported on STM32 CPU with four axis motion planner
Using the camera with Raspberry Pi compute module
There is a great resource about the IMX477 camera on Raspberry Pi pages, feel free to learn how to control and use it from Raspberry Pi. Below is a simple recipe for streaming real-time video from RPI to a computer.
The SCE2-SDK control software can be forked from GitHub. Python code allows code reuse on many operating systems and keeps it human-readable, thus open for customizations.
NestGen 2022 is a global virtual conference on drone autonomy dedicated to building a rich network of industry experts and adopters of drone-in-a-box (DiaB) systems.
Why NestGen? While there are numerous conferences and events that cater to the drone industry at large, there is a dearth of focus on drone autonomy in general and DiaB systems in particular. NestGen is an effort to bring the focus on these critical sections of our industry, which will be the key drivers of growth as we transition from manual operations of drones to full autonomy.
We have often imagined a world where automated drones are able to help us with aerial monitoring, security, inspections, and various other commercial applications with little to no human intervention. It’s now time to make that happen!
What’s happening in NestGen? NestGen is a one-day event that features 11 hours of expert sessions, deep-dives, product updates & announcements, application-specific breakouts, and a boatload of ways to network and engage with the fellow drone community members, virtually.
Topodrone, based in Switzerland, designs and produces professional surveying solutions for UAV mapping and 3D modelling based on the most popular DJI drones, as well as providing comprehensive topography and mapping services.
Topodrone produce the most cost-effective multi-band GNSS PPK modules for DJI drones for Mavic 2 Pro, Phantom 4, Mini 2 and Inspire 2. The kits are extremely easy to install and simple to use. Converted drones are also available ready-to-use. These drones are the ideal affordable solution for mapping at centimeter accuracy with no Ground Control Points, and are fully compatible with Emlid Reach GNSS receivers for the ultimate surveying package.
Surveyors can now get Topodrone Products from Aeromao, the dealer for North America.
The two most popular products are:
Topodrone DJI Mavic 2 Pro PPK
The most compact survey drone with folding arms, maps of up to 30 hectares of high-precision aerial survey in 30 minutes of flight. Highest image resolution among survey drones with 20 MP cameras. Almost half the price of a DJI Phantom 4 RTK drone.
Very compact survey drone with a global shutter with a capacity of up to 27 hectares of high-precision aerial survey in 25 minutes of flight. 20 MP camera's global shutter provides increased accuracy.
The best survey drone to complete aerial survey of the building's façade.
Highest resistance to wind among survey drones of its class.
Customers can also buy just the upgrade kit and turn an existing drone into an accurate surveying professional tool, obtaining up to 3 cm accuracy in XYZ and 1 cm resolution resulting in highly accurate orthomosaics and 3D models.
Kits are available at only $2,714 CAD
Instructions for installation are full support is provided.
I have upgraded my quadcopter XJ470 with a Skydroid T12 radio, an OAK-D depthAI stereo camera and a Raspberry Pi 4 companion computer. This configuration enables state-of-the art artificial intelligence drone piloting. The skydroid t12 enables long distance telemetry and video. The OAK-D combines depth measurements and artificial object detection. The RPi 4 has an WiFi access point enabling remote desktop communication by means of VNC. Avoidance python scripts are uploaded to the RPi 4, generating mavlink drone messages controlling the quadcopter. A test video demontrates the new features.
[Nicholas Rehm] works during the day at the Applied Physics Laboratory at John Hopkins, Maryland, so has considerable experience with a variety of UAV applications. The question arose about how the perseverance mars rover landing worked, which prompted [Nicholas] to hang a rock under his drone, attached via a winch. This proved to be interesting. But what is more interesting for us, is what happens when you try to attach an inverted pendulum to the top of a drone in flight? (video embedded, below)
This is a classic control theory problem, where you need to measure the angle of the pendulum with respect to the base, and close the loop by calculating the necessary acceleration from the pendulum angle. Typically this is demonstrated in one dimension only, but it is only a little more complicated to balance a pendulum with two degrees of freedom.
[Nicholas] first tried to derive the pendulum angle by simply removing the centering springs from an analog joystick, and using it to attach the pendulum rod to the drone body. As is quite obvious, this has a big drawback. The pendulum angle from vertical is now the sum of the joystick angle and the drone angle, which with the associated measurement errors, proved to be an unusable setup. Not to be discouraged, [Nicholas] simply added another IMU board to the bottom of the pendulum, and kept the joystick mechanism as a pivot only. And, as you can see from the video after the break, this indeed worked.
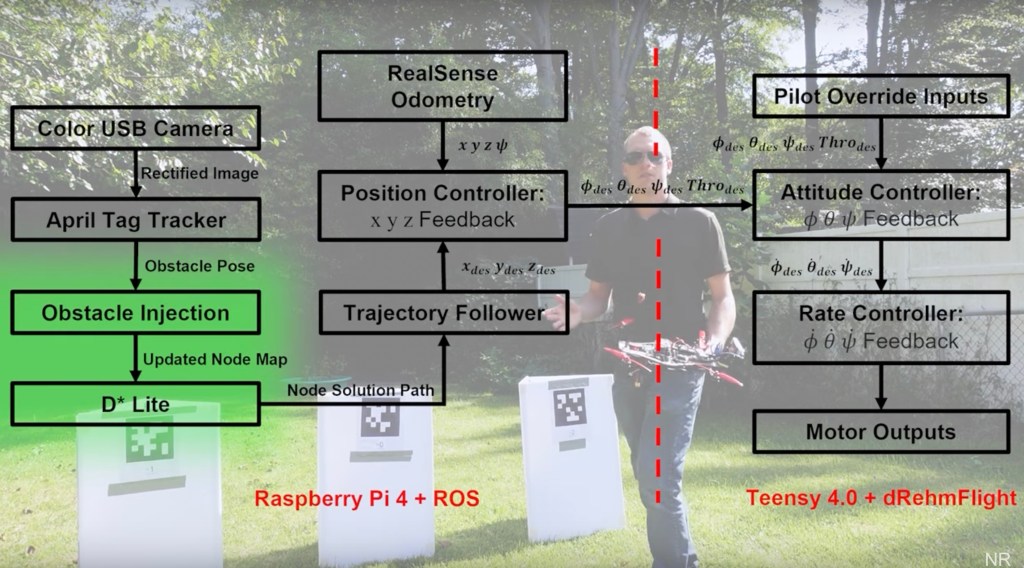
The flight controller is [Nicholas’] own project, dRehmFlight (GitHub), which is an Arduino library intended for the Teensy 4.0, using the ubiquitous MPU6050 6-DOF IMU. [Nicholas] also made an intro video for the controller, which may prove instructive for those wishing to go down this road to build their own VTOL aircraft. The code for pendulum experiment is not available at the time of writing, perhaps it will hit the GitHub in the future?
I have a question. Could anybody direct me to where I can find learning material or some schematics on long range FPV communicarions? I mean any online class, book, website is welcome at this point... I'm trying to learn design principles for 10km or above Video/Data link electronics.
Posted by William Walker on November 16, 2021 at 12:42am
Hi, my name is William. I am developing a large unmanned VTOL aircraft similar in function to the Convergence RC model. The 2 tilting motors in front motors run on 14S batteries. The one in back needs a 28S battery.
I would like to operate the motors using only two 14S batteries. My idea is to connect the 2 batteries in series for the back motor and tap off each battery for the front motors. I will be using Opto ESCs, so that the input signal ground is issolated from the power ground.
Has anyone tried this before? Does anyone think it will not work?
Nicholas Rehm may be a full-time aerospace engineer, but his success in constructing a DIY self-flying drone that avoids obstacles without standard GPS tech aboard still merits a standing-O. He also gets a deep bow for describing the serious wonkitude involved in a thoroughly entertaining way.
Rehm is no neophyte to homemade drone projects – with or without GPS assistance. Given the education and experience required for his day job, no doubt, his DIY endeavors tend to be a great deal more complex than the typical amateur craft that get (as woebegone Soviet citizens used to put it) “snotted together.” His YouTube page contains over a dozen instructional videos of how he devised and assembled his way-complex UAVs, usually relying on wry understatement or irony to cut the thickness of complex processes he’s detailing.
Quite clearly, Rehm not only brings his work home with him, but indeed creates additional labors of love to infect others with his passion for drones and other aerial craft.
“I am a full-time aerospace engineer, but I like to work on interesting flying projects in my free time: drones, airplanes, VTOL, and everything in between,” he says on his video page. “My goal is to share what I learn along the way and make advanced concepts less scary.”
Which is exactly the miracle he pulls off in this video describing how he made a DIY drone that avoids obstacles without using the standard GPS tech aboard most UAV – and without even needing to be connected to outside communication feeds. Which not only makes his autonomous vehicle immune to collisions or outside jamming devices, but immeasurably cool to boot.
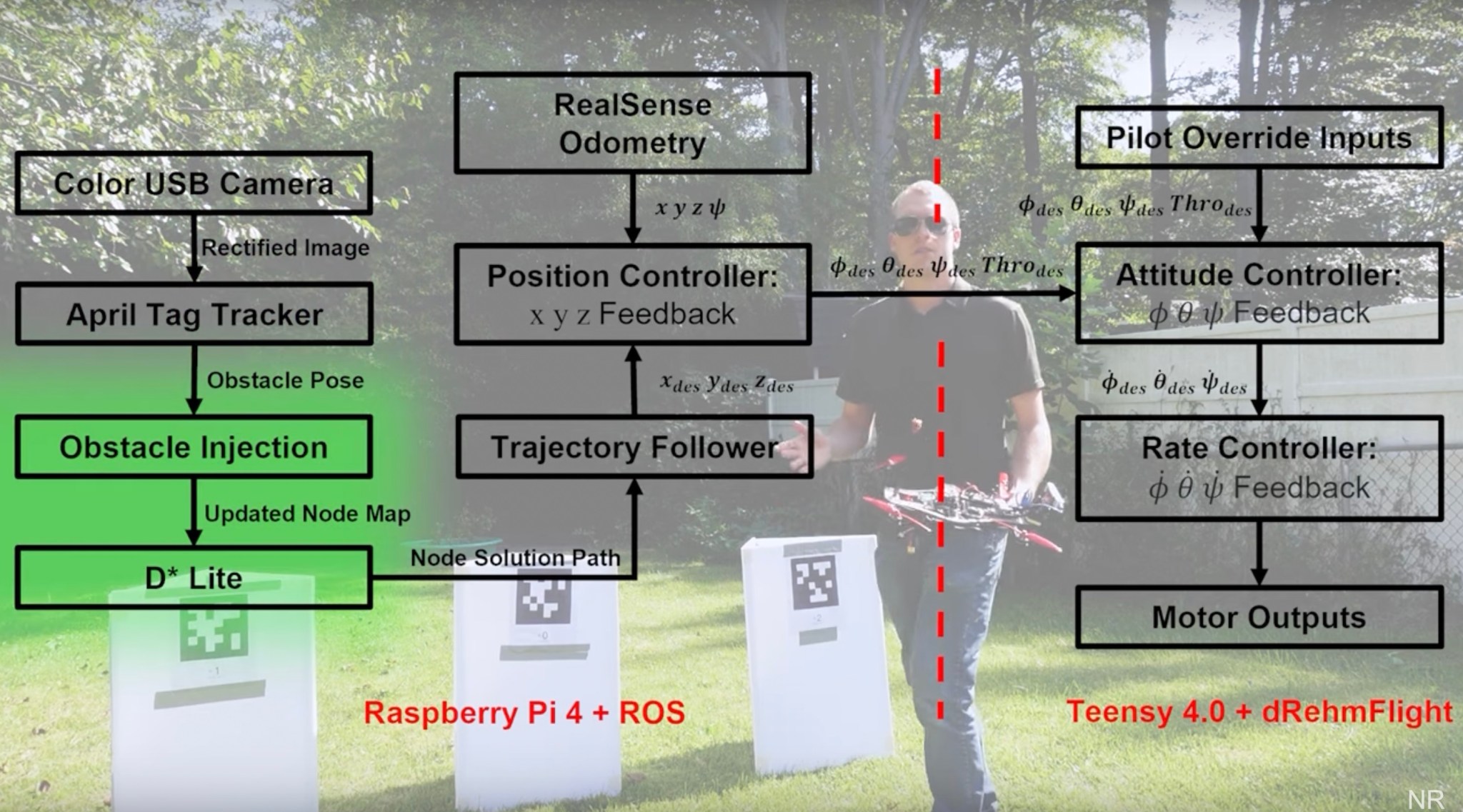
Rehm’s initial idea was to find a viable alternative to habitual autonomous navigation and obstacle avoidance systems. Those require a pre-planned flight path to be entered on a map, waypoint-by-waypoint, that the craft follows in sequence until it reaches the designated destination.
“The drone is actually quite dumb in that it can only fly from one point to the next with no real perception of the world around it, needing to be told what to do for every step of the way,” Rehm explains in the video.
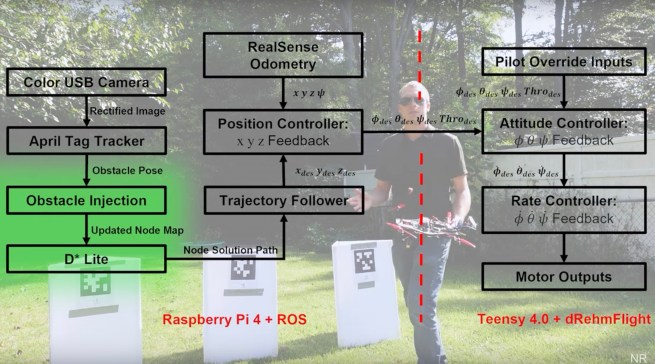
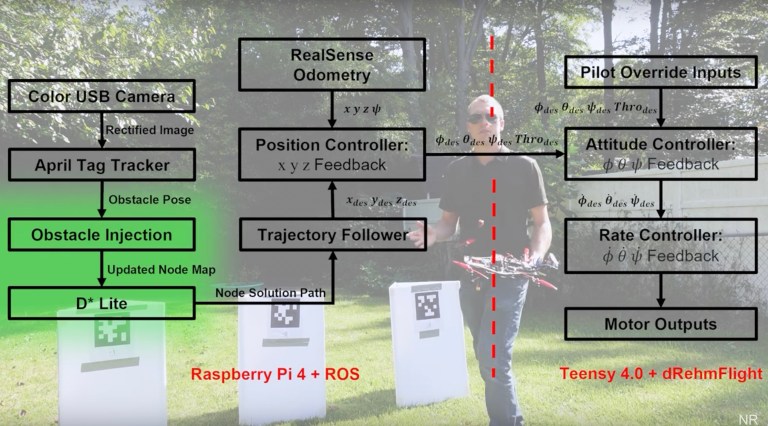
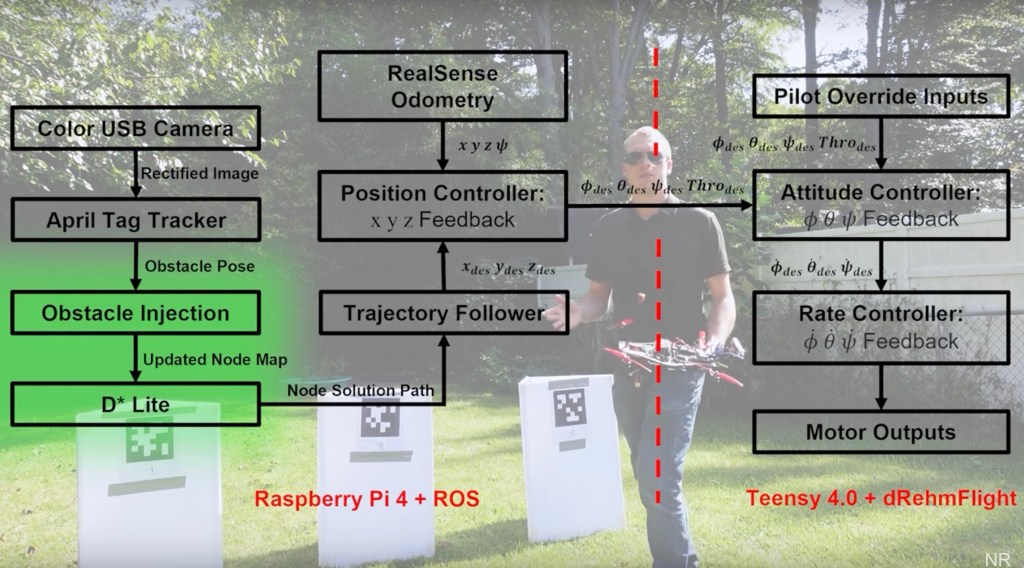
To remedy that, he replaced the foresworn GPS with algorithms powering Google Maps. Those interact with data picked up from the drone’s onboard internal measurement unit, cameras, altitude gauge, position and movement detectors. All of that, orchestrated by a Raspberry Pi 4 using a Robot Operating System, allow the craft to find the way around obstacles it encounters as it advances.
Unlike sequentially progressing as in waypoint-based systems, Rehm’s drone is only told where to go and eventually return to, and is on own from there. As the video demonstrates, when the UAV encounters an obstacle, its programs detect a clear but limited area to either side to take to avoid them. That confined free space detection range is used each time the advancing UAV encounters an obstruction, taking a baby step route around each, but otherwise flying freely until it reaches its destination.
Rather breezily brushing aside the formidable math and engineering needed to pull a feat like his off, Rehm reminds viewers his DIY project is just one of many they can take to greater heights.
“Once you have the building blocks in place for a complex project like this, it’s pretty easy to go back and expand on those individual elements to make the overall system more capable,” Rehm says at the end of the video, his GPS-less drone hovering a few feet away. “For example we could swap out that AprilTag detection algorithm I used for something more robust to maybe detect buildings; or we could expand our motion planning from two dimensions to three.”
Easier for Rehm to say (and believe) than most, though it’s clear he’s sincere in closing out by expressing the motivation for his cutting-edge “snotted together” drone videos.
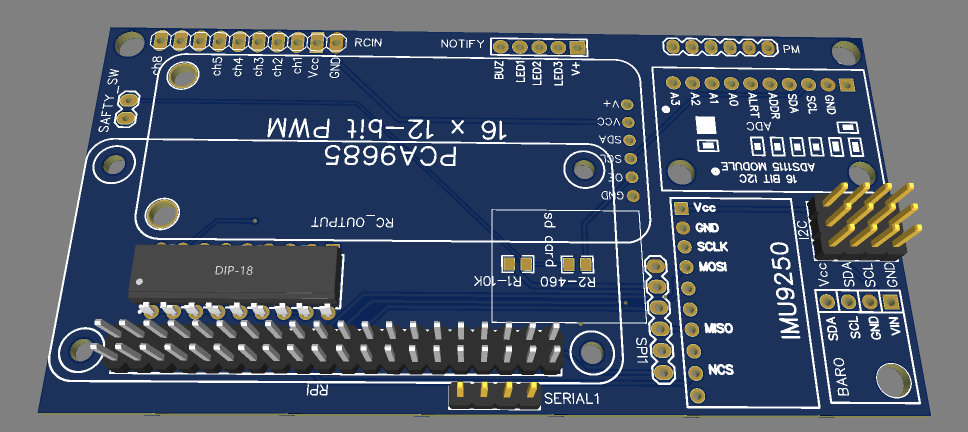
This board is one of many Linux-Based boards that run Ardupilot. What is spepcial about this board is that has very simple architecture. Only necessary components has been added. No extra or redundant components. However it is still expandable and more sensors can be added if you want to.
The PCB shield is designed to use simple breakouts available in the market. No special soldering skills or components are required. You can build from scratch your own board using this PCB and learn the basic architrecture of Ardupilot boards and move to next step where you add extra sensors and ending by building your own board.
Yes this board acts more like a developing kit rather than a ready-to-fly board. Again if you want to fly with it you can but then do not use pin headers and solder the breakouts directly on the board.
On the software side. OBAL board does not have special drivers. All you need to do is to clone ardupilot repository and compile the code. Nothing special, nohting hidden , completely open source.
For more information please check Ardupilot Documentation. Also there are some videos that describe in details how to build it, compile and deploy the software. Have fun :)
Flying drones over long distances or scanning large areas is always challenging. One of the biggest problems is the limited drone communication range. Of course, a drone can fly along the route pre-developed in UgCS, but receiving drone telemetry or sending commands over long distances is not always possible.
For DJI, one of the most widespread drones in the world, the problem is aggravated by the fact that nearly all models require a remote controller with a very limited communication range.
To tackle this problem, we came up with the following ideas:
communicate with a drone via the LTE/4G/5G mobile network
use an antenna with a narrower radiation pattern
use more powerful transmitters and wider communication channels
We investigated each idea and this is what we found.
1. Communication with the drone via the LTE/4G/5G mobile network
That sounded promising since mobile networks are expanding all over the world and mobile communications are covering more and more territory. Of course, flights sometimes take place in remote areas without LTE/4G/5G, but mobile network communication is OK for most use cases. So, we chose this option as the main one.
2. Antenna with a narrower radiation pattern
Using an antenna with a narrower radiation pattern can increase the communication range, but not dramatically. This option has an inherent challenge: a narrow pattern antenna must track the drone position and rotate accordingly. We began working on it because it seemed interesting, so we will publish a post about it in the future. Stay tuned!
3. More powerful transmitters and wider communication channels
Officially there are no devices yet that are compatible with DJI's most popular drones, so this option was discarded from the very beginning.
Controlling a DJI drone via 4G
To try creating a LTE/4G/5G-controlled drone, we opted for DJI as one of the most common drones on the market. We decided to place a 4G modem on the drone and connect it to an automatic flight controller. The analysis showed that there was only one way to do this: use DJI OSDK (https://developer.dji.com/onboard-sdk/documentation/introduction/homepage.html), an additional on-board computer (for example, Raspberry PI or NVidia Jetson Nano) and 4G modem plugged into it.
The DJI OSDK requirements specify the list of compatible drones: all Matrice models and those based on the A3 flight controller.
We assembled an A3-based test bench for local development and debugging. And after successful tests, assembled the full system. The photo with the equipment installed on M600 is provided below.
We also decided that the application should not only ensure integration with DJI OSDK, but act as a full-fledged UgCS onboard VSM (vehicle specific module). That is, the application should allow the drone to connect to UgCS directly via LTE/4G/5G.
As soon as the prototype was ready and debugged, we performed some test flights with Matrice 600.
As a result of all the experiments, we had an application that meets the following requirements:
The application can be installed on the drone using an additional Raspberry PI computer.
The application allows controlling your DJI drone directly from UgCS without additional remote control or mobile app.
The drone connects to an UgCS server via a LTE/4G/5G network.
UgCS onboard VSM behaviour can be modified to support specific requirements: for example, to add some actions during takeoff or manage a non-standard payload.
Considering that our solution could be useful to others, we decided to make it publicly available to simplify the development and use of various solutions based on UgCS and DJI OSDK. You can download the source code here https://github.com/ugcs/dji-onboard-vsm
Here are possible use-cases for the application:
The drone can be managed via the LTE/4G/5G mobile network, which significantly expands the range of drone use cases in areas covered by mobile Internet.
This solution can help air traffic control bodies to easily track the drone, thus replacing ADS-B to some extent.
Additional payload management features can be added.
Instead of mobile communication channels, you can use any other data links that support TCP and UDP packets for video transmission.
You can use our source code as an example and develop your own solution based on the DJI OSDK and UgCS.









 https://dronedj.com/wp-content/uploads/sites/2/2021/11/Rehm.jpg?resize=155,86 155w,
https://dronedj.com/wp-content/uploads/sites/2/2021/11/Rehm.jpg?resize=155,86 155w, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}