I did't know how much important is choose the right propellers, but after changing on my multiwii and arducopter (3dr) i get no vibrations and fly very well :)
this is the video:
I did't know how much important is choose the right propellers, but after changing on my multiwii and arducopter (3dr) i get no vibrations and fly very well :)
this is the video:
Dji is the best multirotor system out there for the price it lives up to the hype. I bought a f330 pre built arf kit used save about a 100.00. I bought a 20c 3s 4000 Economyrc lipo battery flying time about 20 mins. I gotta say I was amazed how stable ,responsive and fast I was able to fly. I took it up about a 100 feet just to hover. it's simple to build the most difficult thing to do is using the software and transmitter setting for first time users but one accomplish that buyer will very happy with the end result. I just order the f450 and the x468 landing and gimble at 129.00 ship made for naza quads here is the link http://www.x468.com/
These things are hard to come by used because so many people are very please with them and when they are so sold used it not at a big saving that why I just bought the f450 with naza fc new. Man I gotta say I love what the folks at Dji have done I hope they keep up the good work because they made a believer out of me

With the arrival of my 3DR radio, I discovered that I had quite a collection of boxes from open source hardware companies. I think it's safe to say they may be setting the pace in the world of electronics delivery packaging!
details here:
http://eastbay-rc.blogspot.com/2012/04/review-open-source-cardboard-boxes.html

I'm thrilled to report that my radio kit arrived and it works well. Andreas is likewise happy with his kit.
Writeup here:
http://eastbay-rc.blogspot.com/2012/04/review-3dr-900mhz-radio.html
Fixing the air unit network id:
http://eastbay-rc.blogspot.com/2012/04/setting-network-address-on-3dr-air.html
Thanks 3DR, Tridge, and everybody else that worked in producing this unit!
Today I went to a mega store and I found this "broken" car for just 9.99 pounds, so I decided to buy it and replace the crappy car that I mounted all the stuffs.
The next week I will buy 1 ultrasound sensor, extension IO and a compass, them should help the car to drive in a specific direction ( i.e. to the north ) and I am going to avoid the obstacles that the sensor will find on the road.
On this week's episode of MyGeekShow we repaired the Nova after it's horrific crash last week, tested our airspeed sensor to see how accurate it is, raced the Raptor around the field trying to measure it's speed, and finally installed a camera on both the Nova and the Raptor. And I may have crashed the Nova again. Yeah. Not good.
This is a new format, and obviously longer. Let us know what you think!
-Trent & Nick
Main Camera: Panasonic HDC-TM900K
--Raptor--
Battery: 20C 2.2Ah Sky http://www.hobbypartz.com/77p-sl2200-3s1p-20c-3333.html
Servos: T-Pro 9G http://www.hobbypartz.com/topromisesg9.html
Motor: Optima 450 2220-1800KV http://www.hobbypartz.com/75m55-optima450-2220-1800kv-2.html
ESC: Exceed RC Proton 30A http://www.hobbypartz.com/07e04-proton-30a.html
Prop: http://www3.towerhobbies.com/cgi-bin/wti0001p?&I=LXZL07
--Nova--
Battery: http://www.hobbypartz.com/77p-sl4400-3s1p-30c-3333.htmlidProduct=6306
Servos: http://www.hobbypartz.com/topromisesg9.html
Motor: http://www.hobbypartz.com/75m42-optima450-2220-950kv.html
ESC: http://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=13429
Prop: http://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idproduct=5437
I've just found an interesting & impressive concept of an flying object from Festo (those guys who also made the flying bird one year ago).
It's a quite interesting concept to get an object flying at low speed. I'd love to see such an object moving outside - but I guess this aircraft is hard to handle when it comes to windy or turbulent conditions. Especially when every part of the object is moving and you have no stable part of the platform where you measure anything against it.
 If you're like me, you've been asked plenty of times if your RC unit can be controlled by an iPhone. Now you may be able to answer yes!
If you're like me, you've been asked plenty of times if your RC unit can be controlled by an iPhone. Now you may be able to answer yes!
Hobbyking IOS & Android 4CH WiFi Receiver
Four channel, talks over wifi, app works by pseudo-stick or tilt control, mysterious reference to "video function", failsafe... seems pretty nifty!
It looks like the unit joins a hard-coded network name, and the password is printed on the receiver.
Reference manual here. The Internet believes this to be the app.

Hi Everyone
Today is Friday and after dispatching all orders finally we are idle.
My MQ-202 MicroQuad was on the desk and airsoft guns were on sight.
Please watch all video we have a surprise in the end ;)
Have a nice weekend
Melih & Bora
I wonder if this could be used with the APM? Pretty interesting to see this now available for less than $300.
First! i'm bad in english but i try to explain everything i done and i have many question to help me if you can.
Last year thailand flood, This is my head video camera 9 km. from take off point.
And i have another camera under the plane for aerial photos
When already have raw material aerial photos then i used photosphop Command to make 1 peice situation map like this (20 photos)
after that i used photoshop (Automate->Photomerge) to processed a lot of pieces (1 piece create from 20 original aerial photos) again for only 1 map photo.
and i used global mapper software to make ground control point for geo reference in this map photo.
make .png and export to .kml to display in google earth
it's not perfect but i can use this for my job.
my job is volunteer in disaster in thailand.
when situation come i use this map for meeting with local people and another volunteer or doctor to plan how to help before real help from gov come.
i learn from many people from internet and rc group in thailand
this is my plane
Hand made air frame form stein aircraft (Thailand)
433 MHz Dradon link
Dradon lab autopilot
2 x 5800 mah
---------------------------------------------------------------------------------------------
Next i want to learn about ardu mega and imu to merge pitch roll yaw to each aerial photo.
i have questions
If i buy APM V2 and IMU V3
- i must to buy OSD?
- between Full ArduPilot Mega kit (soldered, code loaded and ready to fly) from Udrones! or APM V2 and IMU V3 i need?
- IMU V2 can trigger camera , IMU V3 can do that?
- after flight what software to merge pitch & Heading log file with photos?
Somebody can help me or teach me to do this?
Thank you
My name is OB
I know that this is the place of diyers but I am trying to compare Ardu-based copter with other solutions. And by taking into account the conterless hours I spent with Arducopter I can say I am quite satisfied .
This is a video of a friend of mine.
Regards
Hi all,
It occurs to me that I never got around to posting my videos flying my ArduCopter, Cindi Lou, on Mt Erebus last December (2011). I'm at around 10700 ft, but the pressure altitude is around 0.65 bar -- the equivalent of closer to 13,000 ft at the equator. This was on a nice, warm (-15C) nearly windless day. I was pleasantly surprised how well the quad performed in stabilize and simple mode (no sonar, and loiter was unreliable).
I got my APM / Oilpan when they first came out, and that's what's flying in this video. Unfortunately I upgraded to 2.0.49 before going to Antarctica and didn't realize that flight log collection was disabled since I had the atmega 1280 version, so no logs.
This is vaguely related to my PhD research in volcanology. My job on Erebus is to map and study some ice caves that form when volcanic gases melt tunnels into the bottom of the snowpack. The BBC came out and filmed us at work and you can see it in the "Life in the freezer" episode of the BBC / Discovery series Frozen Planet if you're interested.
I'm going back to Erebus for the fourth time this November, and this time I intend to do some serious science using multirotors with APM2 onboard. Some of the caves cannot be entered due to dangerous gasses and / or unique microbiology. I'm planning to fly an autonomous quadcopter down into them, doing SLAM or at least wall avoidance, and measuring gas concentrations. Eventually I'd also like to fly a multirotor down into Erebus' crater to sample gas from the bubbling lava lake. NASA's New Mexico Space Grant Consortium has kindly awarded me a graduate research fellowship for this work, and I am considering an application to NASA NIACS.
Please let me know if you have any advice or are interested in collaborating. Major issues I need to overcome:
Oh, by the way, I'm now flying a 3DR frame with an APM2, and an Xaircraft X650V8 also with an APM2. Thanks to all the developers, the technology has improving by leaps and bounds! As has my own flying ability...
One more question. Does anyone know of other people flying multirotors in Antarctica? Am I the first on the continent? I hope not, because it would be great to start the McMurdo RC flying club!
Cheers,
Aaron
This is information on what the LED's mean on the APM 2.0
Alternating RED & BLUE LED: APM Booting
Flashing BLUE LED: Acquiring GPS Fix
Steady BLUE LED: 3D GPS Fix Aquired
Flashing RED LED: APM Disarmed
Steady RED LED: APM Armed
YELLOW LED?
Steady GREEN LED: APM Power
Flashing ORANGE LED's: Data Transfer
How to arm the APM: Hold your throttle stick down and to the left for 5 seconds the red led should stop flashing and go steady. This important because every time you arm the APM it causes the barometer to be reinitialized (i.e. resets the current altitude to the home altitude).
This is how you set up your receiver to APM and APM to servos using (Spectrum Receivers)
Receiver out to APM2:
Aileron -> APM Ch.1
Elevator -> APM Ch.2
AUX1 (Pitch) -> APM Ch.3
Rudder -> APM Ch.4
Gear (Gyro) -> APM Ch.5 for flight mode switching.
Throttle -> Directly connect to the ESC
APM2 to Servos
Ch1 -> Front Left Servo
Ch2 -> Front Right Servo
Ch3 -> Rear Servo
Ch4 -> Rudder
DX8 Settings. Just the default will do, which has the "Normal" for swashplate setting
Barometer Issues!?
Ok, here is another problem I've spotted in the mind field of hardware issues and for people who continually bang their heads trying to fix them through PID tuning. .
If you have a housing that is covering over all of your electronics such as a plastic container,.. then when you descend or ascend quickly the pressure inside the container changes and gives your barometer an false reading.
For example if you descend quickly the pressure increases inside the container making the barometer think that you are descending faster than you actually are. So the APM will try to compensate this out and try to increase the throttle and this probably cause a bouncing behavior some people are finding happens .
Some may argue that the barometer cant be this sensitive, but I beg to differ because the pressure variation it can sense for the pressure variances in altitude that it works off is very fine. The pressure change inside the container even for horizontal flight will be enough to for it to sense the changes of pressure in the container.
This also includes pressure zones around the incoming and out going air stream around the props if they are to close to the container or even if you have an open center frame the pressure zone around the props can possibly still affect the barometer
I'm considering some fixes for this such as a tube that has a H tube branch at its end and that sits above or below the center board.
I would be interested to know what others view and ideas are on this. .
http://diydrones.com/forum/topics/barometer-issues-and-pid-tuning
Im in two minds about mounting on rubber rings and particularly if it allows the board to wobble even ever so slightly . Any movement at all of the board relative to the crafts frame I suspect will cause oscillation and probably jitters during quick maneuvers. . I'm more in favor of adding vibration dampening pads to the arms and frame rather than suspending the AMP board. Take for example if the motors are causing a horizontal circular vibration from the motors and this circular rotation is say clockwise, then this is without doubt is going to affect the yaw if the board is moving differently to the frames yaw. So if anything I feel the oring idea is in some cases more counter productive than what its trying to achieve. The APM board in my view must be rock solid fixed to the frame to be able to quickly and accurately read what the aircraft is doing. Any compromise even if only very minute will without doubt affect the stability of the aircraft. We have to realise that if the board can be so easily affected from such small amounts of vibration and it is so sensitive, then the idea of APM board suspension mounts possibly is not a good idea
I feel some of the people having trouble with the PID tuning could be because their boards are moving and are not firmly fixed the the frames.
One method I have used to dampen vibration is to wrap a metal rod in some soft rubber and then slid this into the arm tube just under the motor. The rod floating in the rubber wrap takes quite a bit of the high frequency vibration out of the arms.
Just my thought on this.
Resistance is futile...
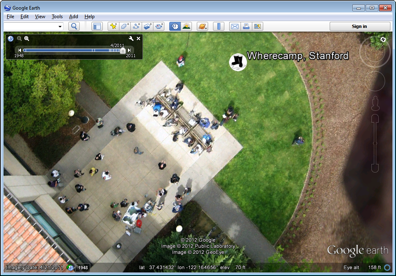 Is your favourite flying area only covered by fuzzy satellite imagery when reviewing your flight logs? Want to do something about it? The Public Laboratory for Open Technology and Science has done the hard part to provide the tools, and the fruits of that labour are starting to pop up in Google Earth.
Is your favourite flying area only covered by fuzzy satellite imagery when reviewing your flight logs? Want to do something about it? The Public Laboratory for Open Technology and Science has done the hard part to provide the tools, and the fruits of that labour are starting to pop up in Google Earth.
Take a look and see if you have imagery you might want to submit too!
Balloon and kite imagery in Google Earth at Google Lat Long Blog.
John Villasenor, senior fellow at the Center for Technology Innovation, Brookings Institution, was on NPR's Talk of the nation today talking about civilian drones. 3D Robotics gets a mention.
As usual, there is some confusion over terms and definitions:
VILLASENOR: Well, first of all, I think it's very important to emphasize that model aircrafts are not drones. Model aircraft are flown within the line of sight of, and under the control of a pilot at all times. And so whatever definition someone might adopt of drones, that definition should not include model aircraft.
I think the other thing that's important to emphasize is that many of our military pilots, unmanned aircraft pilots, they justifiably aren't particularly thrilled with the term drone because it implies - it can imply sort of a hands-off approach, where in fact these folks are extremely skilled aviators who are no less skilled just because they happen not to be in the cockpit. And so they often prefer designations such as UAV, which is unmanned aerial vehicle, or RPA, which is remotely piloted aircraft.
CONAN: But for good or ill, the word drone has become associated with these, and that's the word that's in common usage. So we're going to continue with it.
You can listen to it or read a transcript here.