Nice render! Looks like they 3D scanned the motor/props with 123D Catch. Check it out in full 3D glory at SketchFab here.
All Posts (14049)
Sort by
Hi all, This is all of over the papers these days.
http://andrewsullivan.thedailybeast.com/2012/11/when-will-terrorists-get-drones.html
The Israelis just destroyed a Hamas drone factory.
I know this is a super political topic, but what do people in this community think about this?
Not much to do with drones, but for those broadly interested in robotics, this is very impressive. As Kottke says, it "goes from sexy robot to terrifyingly fast insect death machine in about 45 seconds."

After years of experiments...No more tailless design.
From Hackaday:
A few folks over at National Instruments going under the name LabVIEW Hacker have gotten their hands on a Leap Motion dev kit. The Leap is an interesting little input device designed to track fingertips in 3D space, much like a Kinect but at much higher resolution. Needing something to show off their LabVIEW prowess, these guys controlled their office AR Drone with the Leap, making a quadcopter controller that is completely touchless.
Building on their previous AR Drone hack, the LabVIEW team spent the better part of a day adding wrappers around the Leap SDK and adding in control for their RC quadcopter. Now, simply by moving their fingertips over the Leap sensor, they can control their office quadrotor using a very high-resolution 3D scanner.
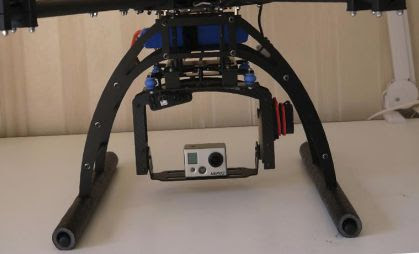
For those of us that have never seen a GoPro camera before, it's hard to imagine just how small this powerful mini really is.
What camera could be smaller while still providing 10 MP, 1080p video at 60 fps all while packing an amazing wide angle lens? Gopro answered that themselves with there new lineup. Coming from $299 for the Gopro2, and $199 for the Gopro 1. The new GoPro lineup leaves there former lineups resale value plummeting.
There are 3 models that belong to the new lineup, each one featuring built in WiFi (a $70 backpack addition for the GoPro2) and each one 25% smaller then the GoPro 2.
Starting the lineup at $199 The white model features 1080p30 / 960p30 / 720p60fps video and a 5MP camera.
The Silver edition ($299) Features 1080p30 / 960p48 / 720p60fp, and a 10MP camera.
But the black steals the show ($399) featuring 1080p60 / 720p120 / 1440p48 / 4kp15 / 2.7kp30 / WVGA-240fps Video and a 12MP camera, as well as an included WiFi remote
Anyone have a 4k Tv?
And you still get the waterproof camera case and mounting accessories free of charge.
Even the older GoPro leaves most camera Gimbal looking overstated, to say the least.
GoPro Hero 3 on a Hexakopter from GravityShots.com on Vimeo.
Cheers,
Jeff
As is customary and traditional, we celebrate every new 1,000 members here and share the traffic stats. This time it's 31,000!
There were just under 1.5 million page views this month, which is a new record (we get over 50,000 page views a day). It took us 33 days to get this latest 1,000 members--we're averaging about one new member every 44 minutes.
Thanks as always to all the community members who make this growth possible, and especially the moderators who approve membership applications and blog posts and otherwise answer questions and keep things ticking here. We've got about 60 moderators now, but if anyone would like to join this group, please PM me. If you've been here for a while and have been participating, you'll fit in great.

Some time ago I made GPS module with MMC3120 magnetometer. I wanted to have possibility to place the module far away from magnetic and electromagnetic disturbances generated by the drive system in multicopters. Short after the magnetometer became not available. Now I made another, bit more optimised module with choice of mounting 3 magnetometers: MMC3140, MAG3110 and HMC5883. All it works on I2C bus.
In last days I made comparison of the magnetometer parameters. I compared the data span, noise level, sensitivity to ambient temperature change.
Results of test you can find in article on my website: Comparison of magnetometers

If you are interested in comparisons, some time ago I made similar comparison of pressure sensors where was compared MPXH6115, BMP085 and HP03SA.

Yesterday I received one of the first updated Gluonpilot 2's from Tom Pycke in Belgium,
The Gluonpilot is an open source project created by Tom and the new GP2 is a completely new hardware design but firmware will run on both new and old Gluonpilots.
I have been flying the Gluonpilot extensively this season and I especially like the Ground Control Station which allows route updates during flight and displays everything live in Google Earth.
Gluonpilot2 specifications from the www.gluonpilot.com web-page;
MPU-6000 based
All needed sensors (including the switched power supply) are on the main board
On-board USB connector
2 voltage inputs for batteries
1 current sensor input
Extendable: all pins are available on the extension board (I2C, SPI, GPS, ...)
Rewritten OSD firmware with unique features: wind indicator, current navigation block name
High-Efficiency switched voltage regulator at 2.5Mhz
Top quality components for optimum performance: X7R capacitors & 1% resistors
Enough solder jumpers & in- & output ports to customize it to your needs
After picking up my pre-order copy of Black Ops II earlier this week, I felt inspired to make a quick multicopter flight video with a Sci Fi flair. Copter is my Xaircraft X650-V8 using GoPro for video.
I was just notified by a supplier of gps modules in RSA that this product has become available locally(RSA). I'm not sure how long this has been out in the rest of the world, but the following statement had my attention : NEO-6P GPS module for Precise Point Positioning....OK, what is PPP, and how accurate is it exactly. The guys at ublox claims positional accuracy of <1m. http://www.u-blox.com/en/gps-modules/neo-6p-/neo-6p.html
This is brillian for a L1 receiver. Then the small print - it can achieve and maintain this level of accuracy in static or slow moving applications. It is priced at around 1.5* the T chip's price and also has the raw data output capability that can be used in achieving a RTK fix (OpenRTK lib. ect).
Looking ahead in the quest for affordable, reliable 5cm accuracy receivers, I can not help but wonder when we will see a L1+L2 receiver from ublox at a price that does not involve selling a kidney. Are these guys going to stay with the mobile device position market? Will this market's demand for more accurate solutions push them to release technology they already posses (I'm speculating, but pretty sure). Can't wait for the NEO-6RTK.
I've been flying the quad for a bit now trying. Decided to test the functionality of a X52 controlling the quad. Aside from the bad pot on a older x52 I'd say it works pretty well. I'm tempted to go out and buy a new x52 based off these results..
:) IT FLY'S :) Maiden flight of Yellow Plane Hextronic DT850 Turnigy 2200mAh Xbee Arduino Controller
Maiden flight of Yellow Plane flown by a local pilot Richard to avoid instant crash I would cause. A little tail heavy but flew pretty well on a gusty day, I'm told control was good. Ended in a crash but not too badly damaged, learned a lot. I'm just chuffed if flew looks pretty good on such a windy, which is pretty standard for the south island this time of year.
My scratch built FPV platform. Took around 30 hours to build mostly Corriboard with some ply, aluminium and carbon fiber spars. Total material cost around 50 US$. Got a DT700 (see tests data here) which hopefully will be an adequate power source. Its a modular design based around an armature, so wings and tail etc are bolted on and can be exchanged for testing parts and ideas. Have a pair of KM3 wings and the Corriboard one shown below.
Please see the spread sheet here Yellow Plane Data
Based around a stiff wooden armature and two aluminium tail spars the wings are removable for transportation. According to my calculations the wing loading is 15.5 Oz/Ft² at a flight weight of 1700 Grams. A glass fiber nose has been molded and is curing now which is around 80 grams, which will contain the FPV gear and the main battery.
Home brew Arduino Xbee remote control
One of the major weak spots with multi-rotors is the exposed propeller blades, they break and they hurt things.
I know people have designed guards and experimented with ducted fans, but has anyone done work with a boundary layer turbine arrangement? I've been kicking this idea around in the back of my head for some time now and just recently saw a ceiling fan project that uses this effect.
I always imagined a nested conical frustum stack (imagine lamp shades stacked on top of one another with a small gap between each). As the assembly spins, air is accelerated from the center down and out at an acute angle relative to the vertical axis, whereas the above ceiling fan example moves the air perpendicular to the rotation axis. I know it will blow air, but will it move enough to provide any useful thrust?
Any thoughts?
Now if I could just get a hold of some graphene and aerogel lampshades to experiment with...
Just received my udrones.com hexacopter. I had been looking for reviews and information on the product before i purchased but just couldn't fine anything out there. I bit the bullet and purchased this craft from them and was happy with their service and the quality of the product when it arrived.
I went all out and bought the RTF version with all the bells and whistles as this was my first foray into the Arducopter world after flying the blade mqx for some time. Here is a video of unboxing the copter and running through what came in the box.
Enjoy!!
I know that it is taken as common knowledge that a hexacopter with a single motor failure cannot be flown beyond a controlled crash landing, but this is just plain wrong with our ArduPilot Mega hardware and if we can't do it, it is because of inadequate software.
I have a KK X525 quadcopter which I have flown very successfully for some time with the APM2.
One ESC on it is now progressively failing, continuously reducing power to it's motor after about 2 minutes flight, but all you notice immediately is the need to feed in a little more throttle and eventually it starts descending even at high throttle.
Once it touches the ground you need to switch out of any auto mode to prevent it flipping over (usually too late).
But the moral is that even with one motor failing it tries to maintain level and flight is still controllable.
On a hex if one motor fails all you should have to do is shut off the opposite motor and it should still be completely controllable as long as you have sufficient thrust in the remaining 4 engines to hover the copter.
Auto shutdown of an opposite motor could be handled entirely in software on the APM and control should be fully maintained. as you still have 2 motors turning each way and the lefit points are still symmetrical.
No spinning, no loss of control, no nothing.
If the Arducopter doesn't do this it should and I would definitely like to know what you think.
This could be a tremendous safety and long term cost advantage for a hex and not require an Octo as previously thought.
November 15, 2012; The Pinery Project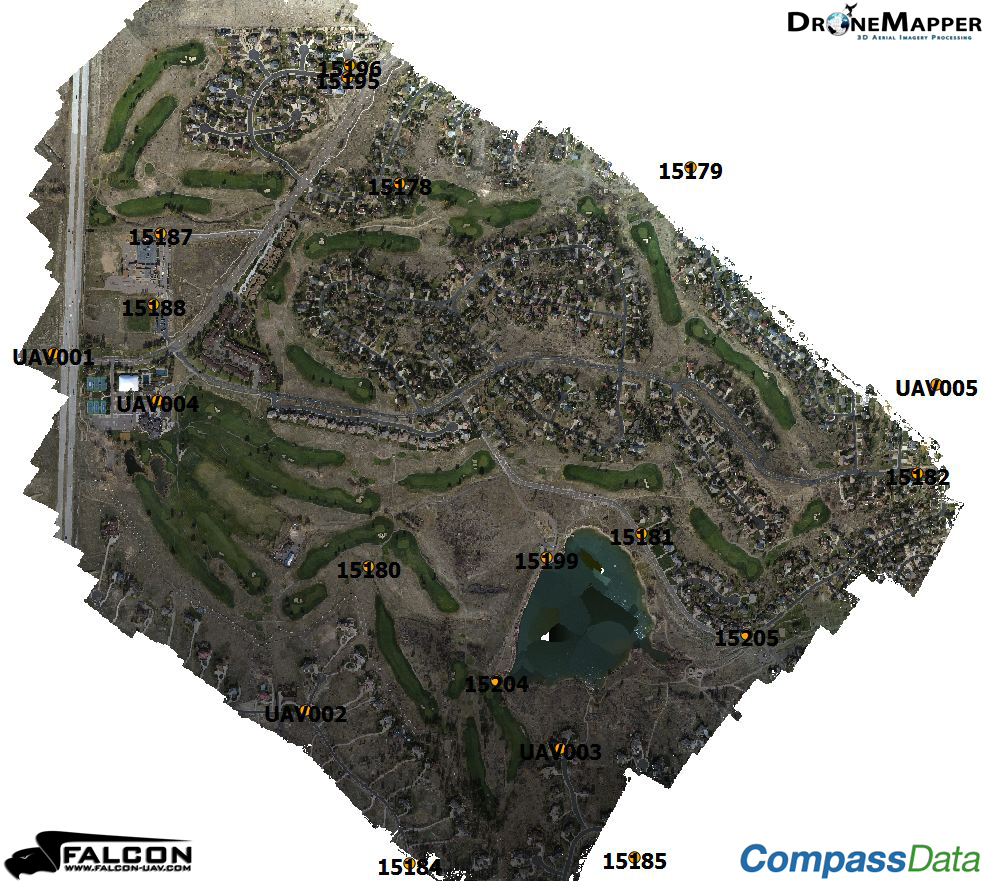
In a collaboration between DroneMapper, Falcon UAV, CompassData, Inc. and The Pinery Country Club we collectively demonstrated accurate geo-spatial mapping (in 3 dimensions) of a reasonably large area using affordable technology - UAV, consumer camera and ground control. First, a little bit about our partners:
Falcon UAV is a small unmanned aircraft designed to provide live aerial reconnaisance and airborne sensor capabilities to those who require a military grade system at a fraction of the cost. Capable of providing over an hour of endurance, day or night, the system provides public safety communites, research organizations, academia, and industry a professional hand launched UAV solution at an affordable price. For more information please visit - http://www.falcon-uav.com/
CompassData, Inc. provides the world's largest commercially available ground control data set - complete global coverage with 18,000 ground control points available for download. For more information please visit - http://compassdatainc.com/
The Pinery Country Club offers as one of its amenities a private 27 hole golf course in Parker, Colorado. Management at the Pinery was very gracious in allowing us to collect imagery over their property. In addition, the property contained 15 precision (5 or 30 cm absolute position) ground control points that were used for data processing and accuracy quality verifications. For more information please visit - http://www.thepinerycc.com/club/scripts/home/home.asp
This ortho shows the Pinery CC area of interest and the ground control that was mapped by Falcon in a 1 hour flyover. The area covered was approximately 3.4 Km^2 @ 13 cm GSD. (6.7cm GSD available as full result)
Falcon being hand launched.
Typical ground control point being surveyed.
Pinery ortho detail.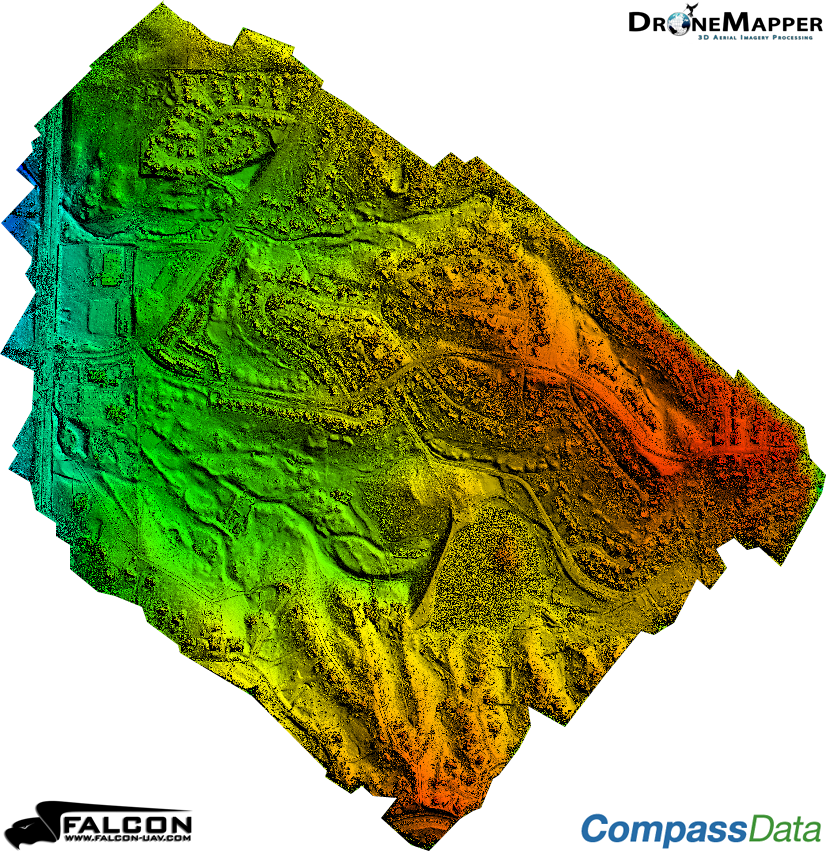
3 digital elevation models (example shown above) were constructed using 1) only camera GPS tags, 2) only Falcon flight log GPS tags and 3) 6 ground control points. For cases 1) and 2) all 15 GCPs were used for accuracy evaluation. In case 3) 9 GCPs were used for QA evaluation. The table below shows the Root Mean Square Error in meters and the Circular Error at a probability of 90% for each of the 3 cases.
Test Case | RMSE X (m) | RMSE Y (m) | RMSE Z (m) | CE90 (m) |
1 - Camera Tags | 8.4 | 6.7 | 27.6 | 14 |
2 - Falcon Tags | 4.5 | 9.2 | 27.7 | 6.4 |
3 - 6 GCP | 0.17 | 0.18 | 1.9 | 0.35 |
The full accuracy reports from CompassData, Inc. are downloadable below:
Camera Tags - CompassDataInc_FalconUAV_DroneMapper_PineryCanonGPS13cmUTM13N.pdf
Falcon Tags - CompassDataInc_FalconUAV_DroneMapper_PineryFalconGPS13cmUTM13N.pdf
GCP - CompassDataInc_FalconUAV_DroneMapper-PineryGCP13cmUTM13N.pdf
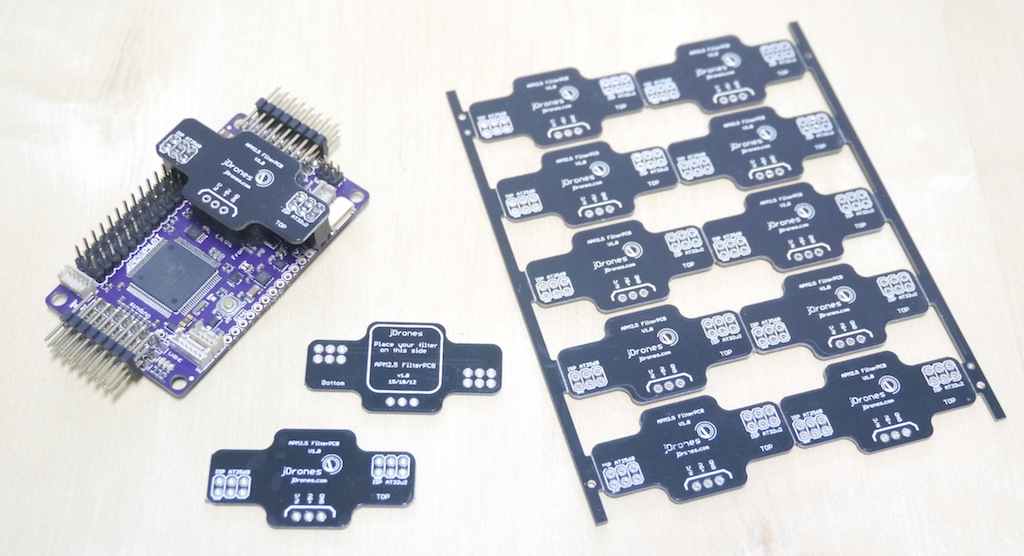
If your barometric sensor exposed on APM2.5?? Or you have tape/foam hack to cover it. Here is more elegant way to cover your baro nicely. On older APM2.0 baro sensor was covered with another PCB so it was not so exposed to wind blows and you got better altitude hold with it. On new APM2.5 board upper daughter board has been removed and barometric sensor is now fully exposed so it needs to be covered to avoid erroneous altitude readings.
We made custom APM2.5 Filter PCB for this purpose. It connects on both ISP pins on APM2.5 and foam on middle covers baro. There are additional +5V input provided on this board if you want to boost +5V system on your flight controller.
Ardupilot-Mega Wiki page has guide how to cover your baro but we were thinking that there has to be better ways than using tape and foam. Yes there are.
Which one you prefer?
Filter PCB's are now available on jDrones store, 4.5 USD each. So grab one during your next order and you will get a lot more accurate altitude response from your APM2.5 boards.
Jani / jDrones
If you're a subscriber to Servo Magazine (and you should be) you'll recognize something in this month's issue--a rave review of APM 2.5! Low-res pages are below; subscribe for the full versions!